

目录
快速导航-
先进流体系统设计与优化专栏 | 基于多自由度参数化降维方法的涡轮叶片高效气动优化
先进流体系统设计与优化专栏 | 基于多自由度参数化降维方法的涡轮叶片高效气动优化
-
先进流体系统设计与优化专栏 | 考虑迟滞特性的自增容弹性压力油箱建模研究
先进流体系统设计与优化专栏 | 考虑迟滞特性的自增容弹性压力油箱建模研究
-
先进流体系统设计与优化专栏 | 耦合滑靴副和配流副的柱塞泵振动及润滑特性研究
先进流体系统设计与优化专栏 | 耦合滑靴副和配流副的柱塞泵振动及润滑特性研究
-
先进流体系统设计与优化专栏 | 空化与非空化下高速开关阀阀芯液压力特性研究
先进流体系统设计与优化专栏 | 空化与非空化下高速开关阀阀芯液压力特性研究
-
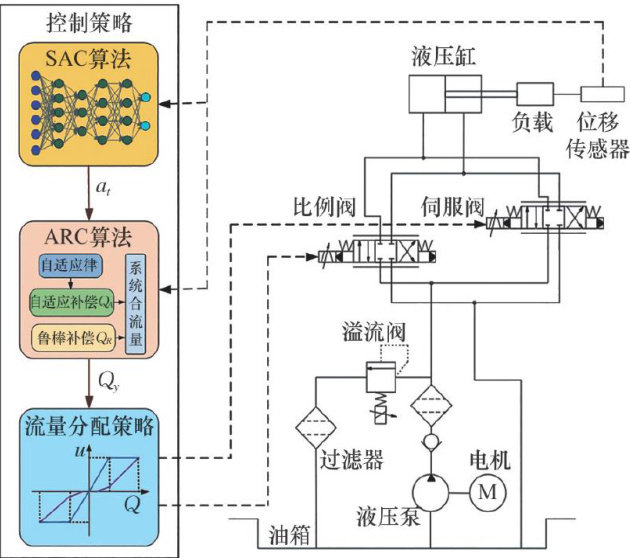
先进流体系统设计与优化专栏 | 融合强化学习自适应鲁棒控制算法的异构双阀协调控制策略仿真及实验
先进流体系统设计与优化专栏 | 融合强化学习自适应鲁棒控制算法的异构双阀协调控制策略仿真及实验
-
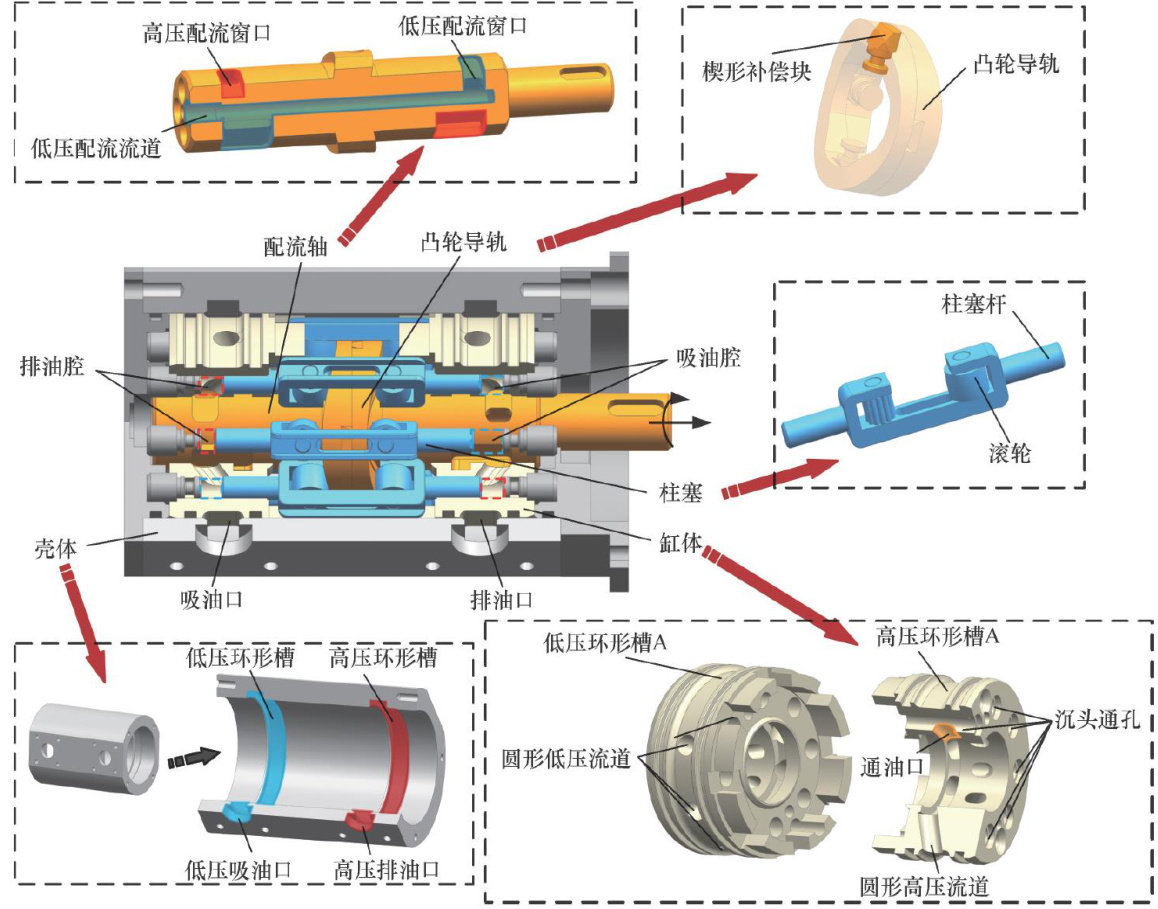
先进流体系统设计与优化专栏 | 滚子柱塞泵的流量脉动与出口压力的数值模拟及实验验证
先进流体系统设计与优化专栏 | 滚子柱塞泵的流量脉动与出口压力的数值模拟及实验验证
-
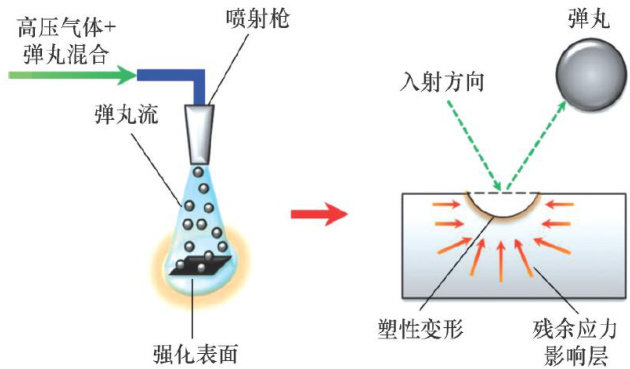
机械基础工程 | 高温合金喷丸工艺表面完整性及其疲劳性能研究进展
机械基础工程 | 高温合金喷丸工艺表面完整性及其疲劳性能研究进展
-
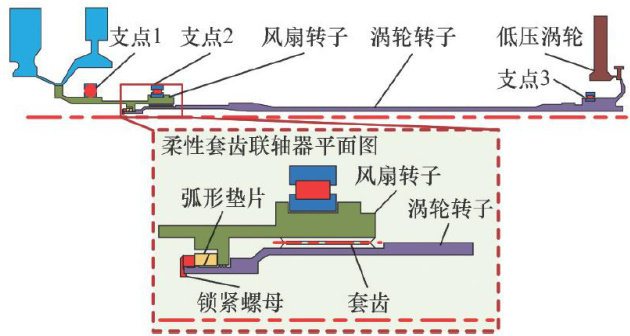
机械基础工程 | 考虑接触面摩擦的柔性套齿连接结构刚度数值建模与非线性机理分析
机械基础工程 | 考虑接触面摩擦的柔性套齿连接结构刚度数值建模与非线性机理分析
-
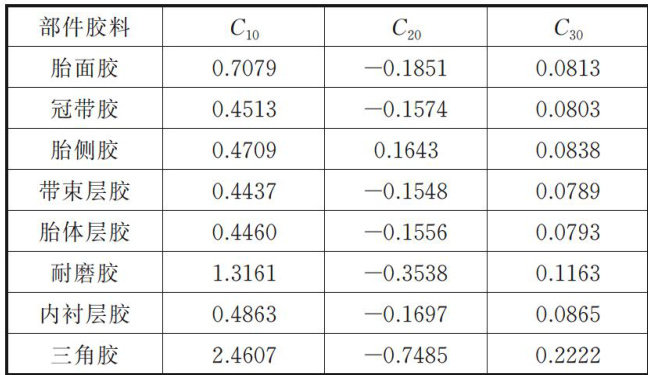
机械基础工程 | 复合工况下轮胎滚阻与抓地性能协同提升研究
机械基础工程 | 复合工况下轮胎滚阻与抓地性能协同提升研究
-
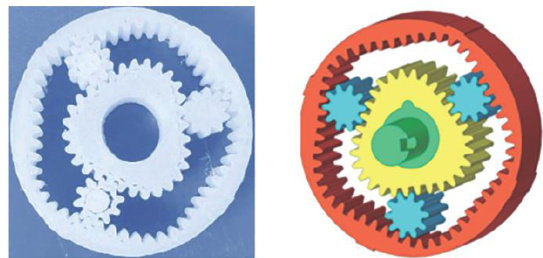
机械基础工程 | 非圆行星齿轮传动系统非线性动力学特性
机械基础工程 | 非圆行星齿轮传动系统非线性动力学特性
-
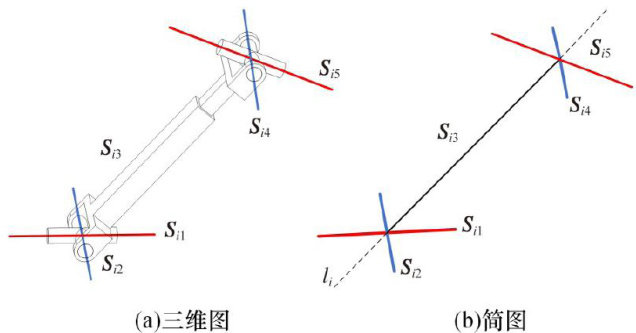
机械基础工程 | 基于变轴线运动副3(rU)PU变胞并联机构设计
机械基础工程 | 基于变轴线运动副3(rU)PU变胞并联机构设计
-
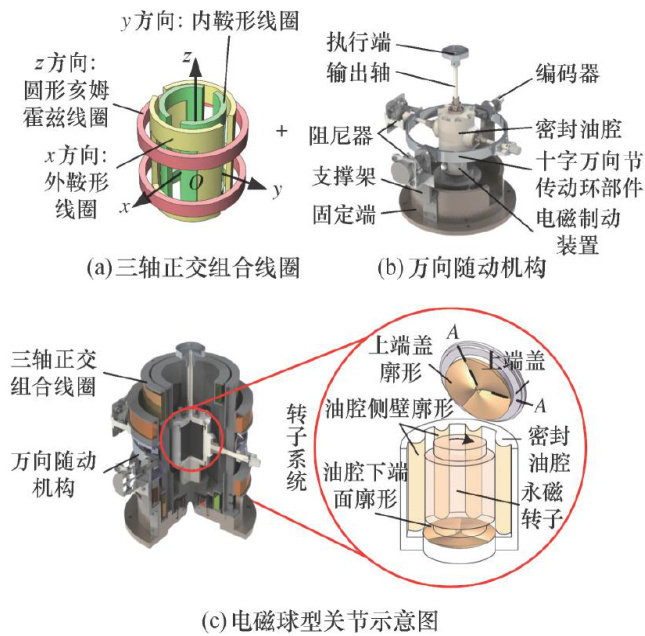
机械基础工程 | 电磁球型关节全悬浮转子抑振油腔廓形优化
机械基础工程 | 电磁球型关节全悬浮转子抑振油腔廓形优化
-

机械基础工程 | 基于两阶段灰云模型的工件加工精度异常评估
机械基础工程 | 基于两阶段灰云模型的工件加工精度异常评估
-
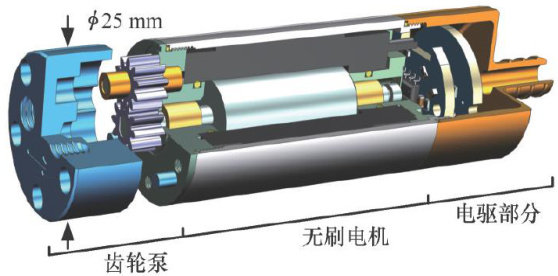
机械基础工程 | 高速航空齿轮泵间隙对效率影响研究
机械基础工程 | 高速航空齿轮泵间隙对效率影响研究
-
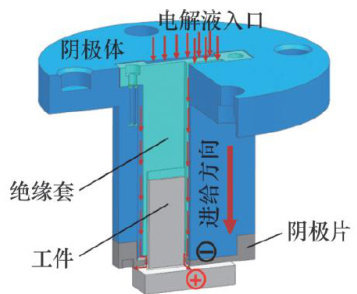
机械基础工程 | 整体叶盘套形电解加工绝缘套优化方法研究
机械基础工程 | 整体叶盘套形电解加工绝缘套优化方法研究
-
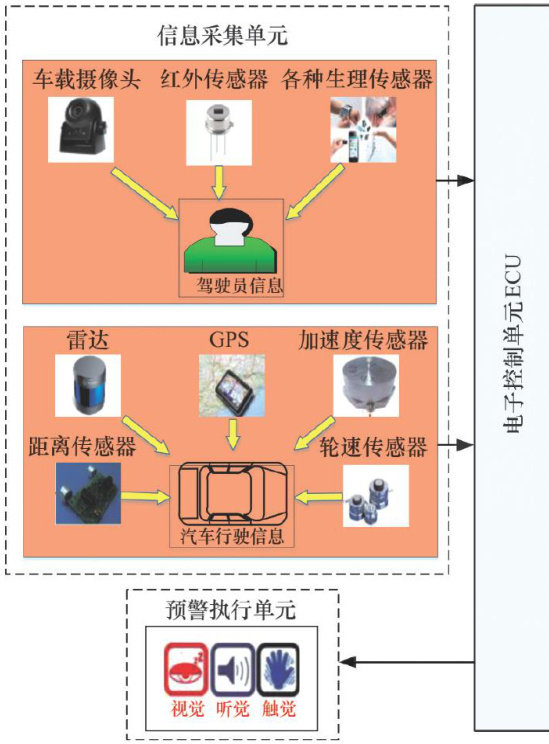
机械基础工程 | 基于专利规避设计的疲劳驾驶预警系统扩展概念设计
机械基础工程 | 基于专利规避设计的疲劳驾驶预警系统扩展概念设计
-
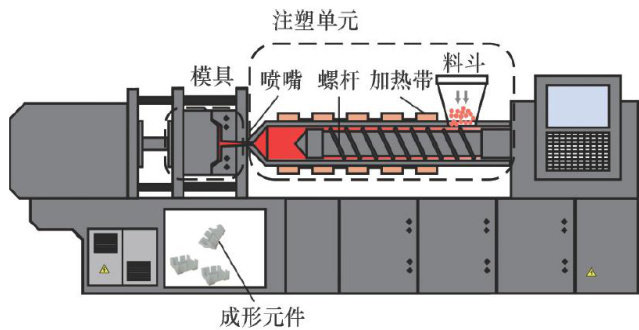
智能制造 | 基于TCN-BiGRU-SE两阶段特征提取与多特征融合的注塑质量预测方法
智能制造 | 基于TCN-BiGRU-SE两阶段特征提取与多特征融合的注塑质量预测方法
-

智能制造 | 一种面向多保真Kriging模型结构可靠性分析的主动学习方法
智能制造 | 一种面向多保真Kriging模型结构可靠性分析的主动学习方法
-
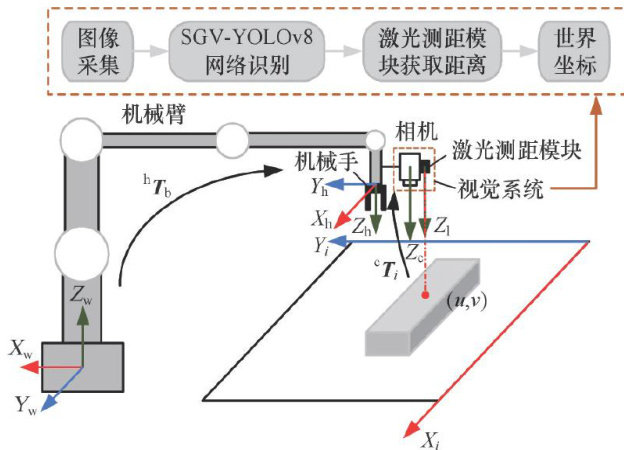
智能制造 | 基于SGV-YOLOv8模型的机械零件智能识别与抓取方法
智能制造 | 基于SGV-YOLOv8模型的机械零件智能识别与抓取方法
-
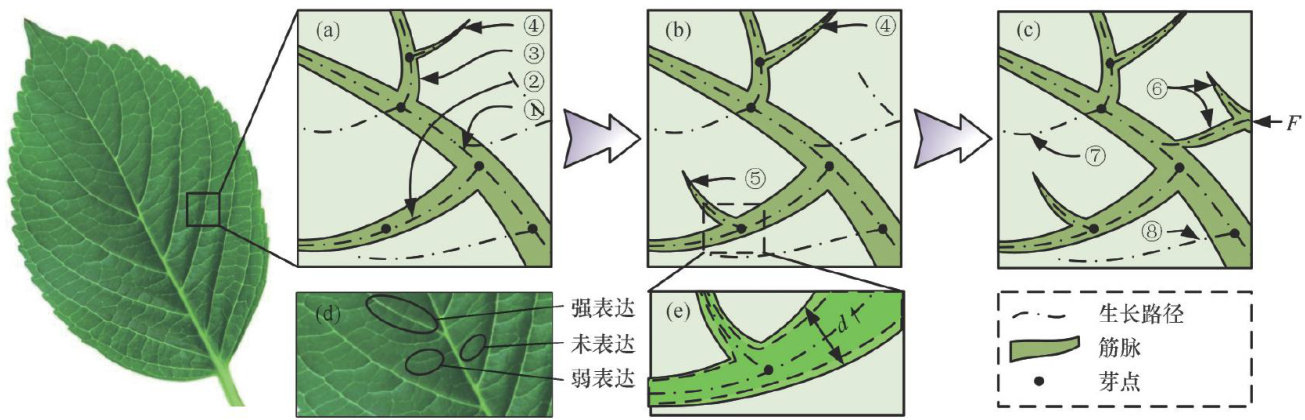
智能制造 | 基于仿生扩散生长驱动的加筋板壳抗屈曲拓扑设计
智能制造 | 基于仿生扩散生长驱动的加筋板壳抗屈曲拓扑设计
-
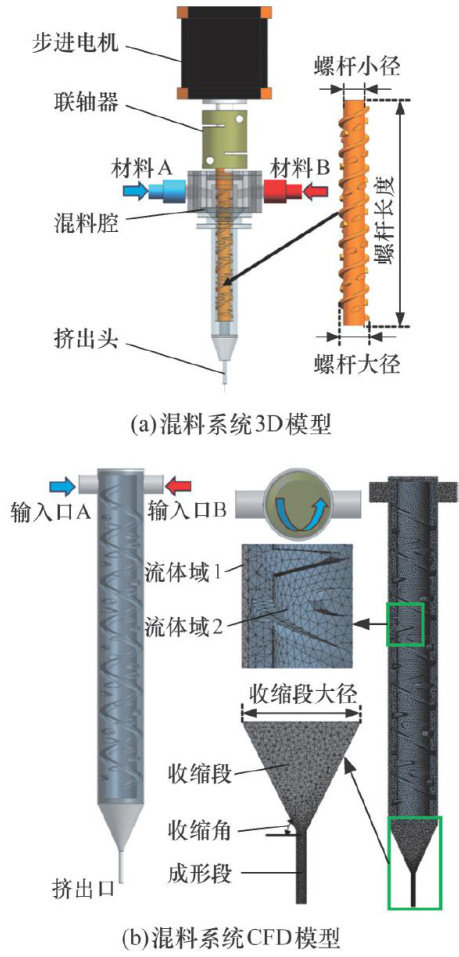
先进材料加工工程 | 直写成形工艺制备的功能梯度材料零件时变挤出系统建模
先进材料加工工程 | 直写成形工艺制备的功能梯度材料零件时变挤出系统建模
-

先进材料加工工程 | 基于多策略改进复合麻雀搜索算法的自冲铆成形质量预测
先进材料加工工程 | 基于多策略改进复合麻雀搜索算法的自冲铆成形质量预测
-
工程前沿 | 全断面矩形掘进机刀盘设计及其稳定截割岩样截割特性试验研究
工程前沿 | 全断面矩形掘进机刀盘设计及其稳定截割岩样截割特性试验研究
-
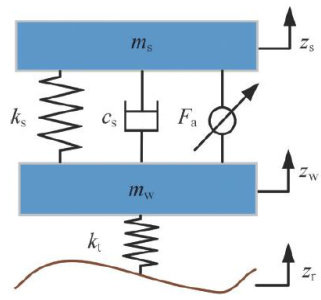
工程前沿 | 考虑系统噪声与载重未知的智能车路况辨识
工程前沿 | 考虑系统噪声与载重未知的智能车路况辨识









 登录
登录