
目录
快速导航-
综述评论 | 多模态行人重识别研究综述
综述评论 | 多模态行人重识别研究综述
-
综述评论 | 语义通信在边缘算力网络中的应用研究综述
综述评论 | 语义通信在边缘算力网络中的应用研究综述
-

区块链技术 | 基于同态加密和零知识证明的区块链可扩展隐私保护方案
区块链技术 | 基于同态加密和零知识证明的区块链可扩展隐私保护方案
-
区块链技术 | HyperledgerFabric并发冲突消除机制
区块链技术 | HyperledgerFabric并发冲突消除机制
-

大模型专题 | PMoE:在P-tuning中引入混合专家的参数高效微调框架
大模型专题 | PMoE:在P-tuning中引入混合专家的参数高效微调框架
-
大模型专题 | 基于大语言模型的多任务生成式重构对话情绪识别
大模型专题 | 基于大语言模型的多任务生成式重构对话情绪识别
-
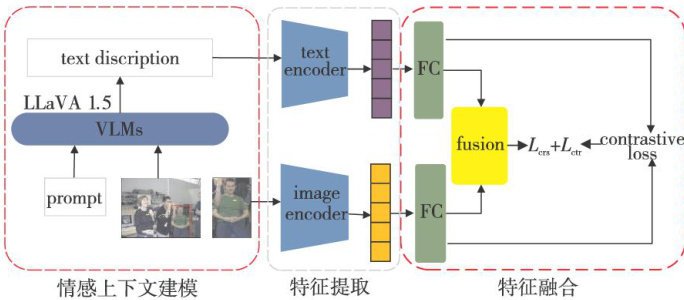
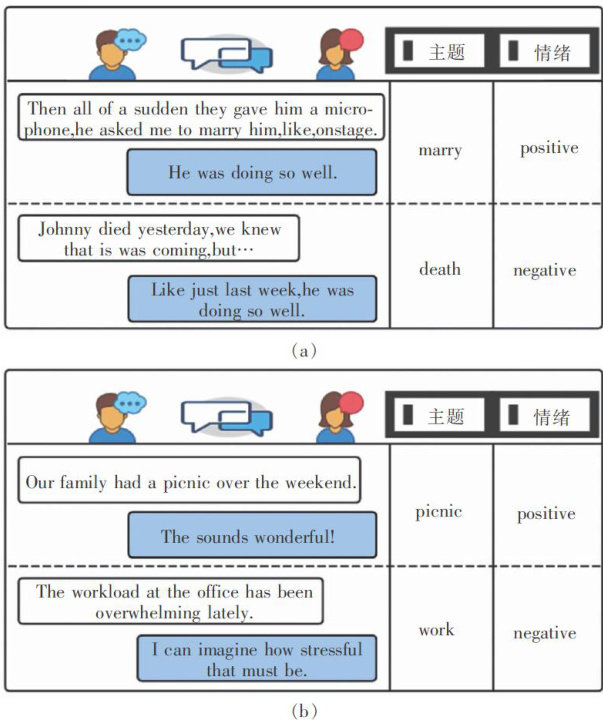
大模型专题 | 基于图文对比融合的图像人物情感识别
大模型专题 | 基于图文对比融合的图像人物情感识别
-
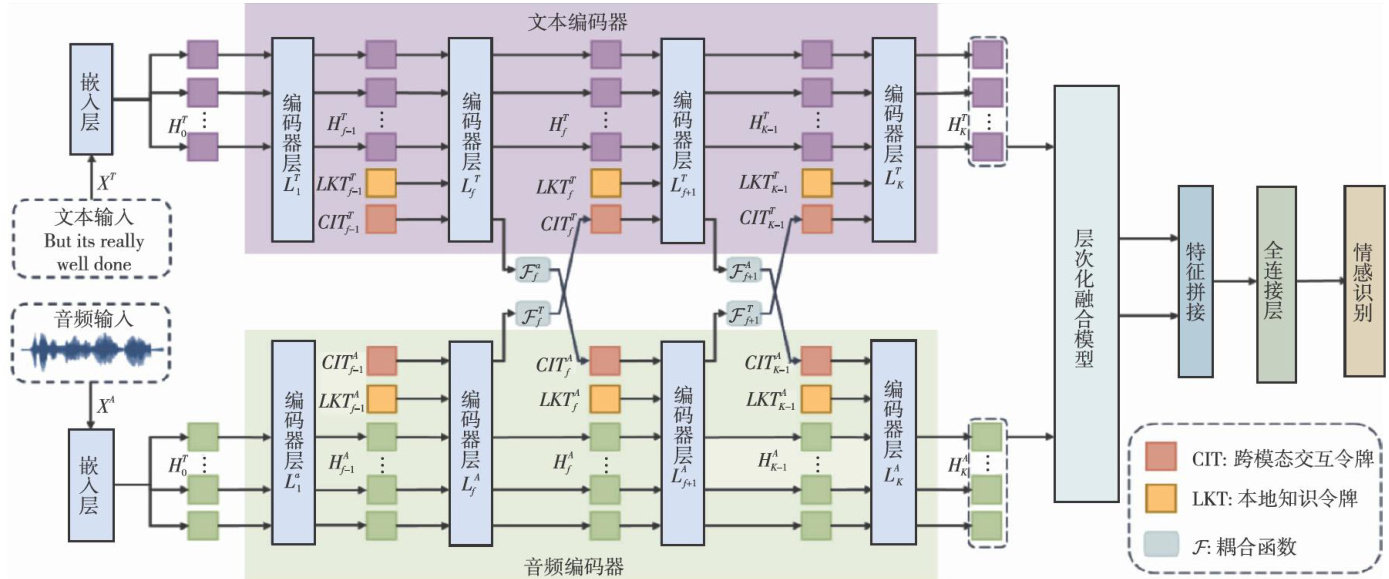
大模型专题 | 基于深度特征交互与层次化多模态融合的情感识别模型
大模型专题 | 基于深度特征交互与层次化多模态融合的情感识别模型
-

大模型专题 | 反向聚焦细粒度多模态语义对齐的视频字幕模型
大模型专题 | 反向聚焦细粒度多模态语义对齐的视频字幕模型
-
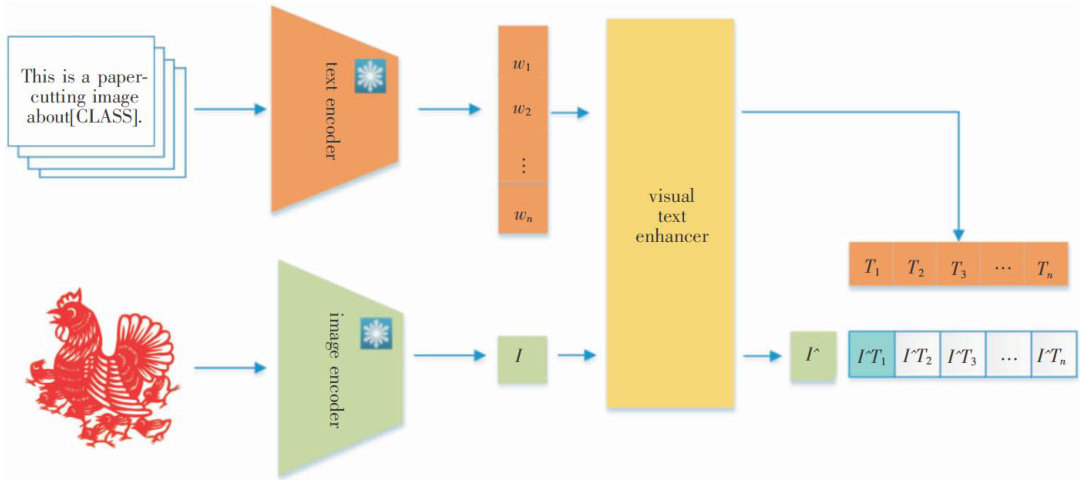
大模型专题 | 基于CLIP文本特征增强的剪纸图像分类
大模型专题 | 基于CLIP文本特征增强的剪纸图像分类
-

算法研究探讨 | 基于完整超图神经网络的捆绑推荐模型
算法研究探讨 | 基于完整超图神经网络的捆绑推荐模型
-

算法研究探讨 | 基于高阶邻域信息交互的自监督异质图嵌入算法
算法研究探讨 | 基于高阶邻域信息交互的自监督异质图嵌入算法
-

算法研究探讨 | 基于超图和分层频谱滤波器的序列推荐模型
算法研究探讨 | 基于超图和分层频谱滤波器的序列推荐模型
-
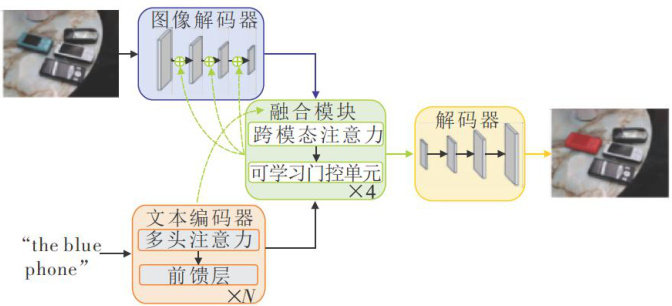
算法研究探讨 | 针对图像指代分割的训练后量化策略
算法研究探讨 | 针对图像指代分割的训练后量化策略
-
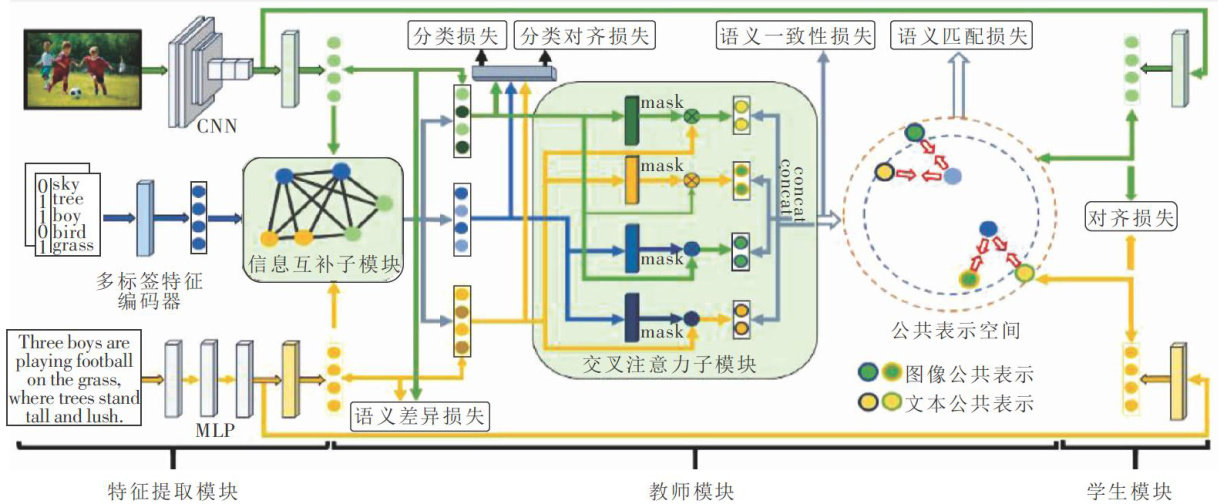
算法研究探讨 | 基于信息互补与交叉注意力的跨模态检索方法
算法研究探讨 | 基于信息互补与交叉注意力的跨模态检索方法
-
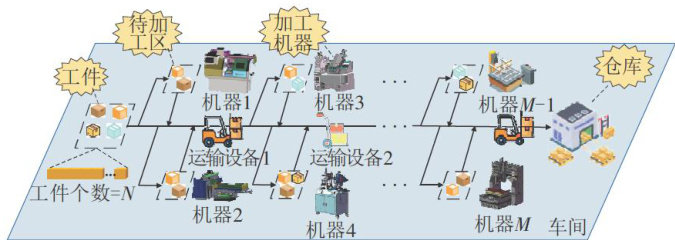
算法研究探讨 | 基于强化学习协同进化算法求解柔性作业车间节能调度问题
算法研究探讨 | 基于强化学习协同进化算法求解柔性作业车间节能调度问题
-
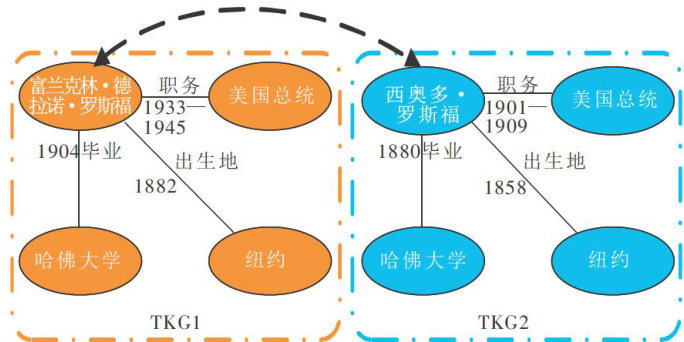
算法研究探讨 | 融合实体邻域信息的时序知识图谱实体对齐
算法研究探讨 | 融合实体邻域信息的时序知识图谱实体对齐
-
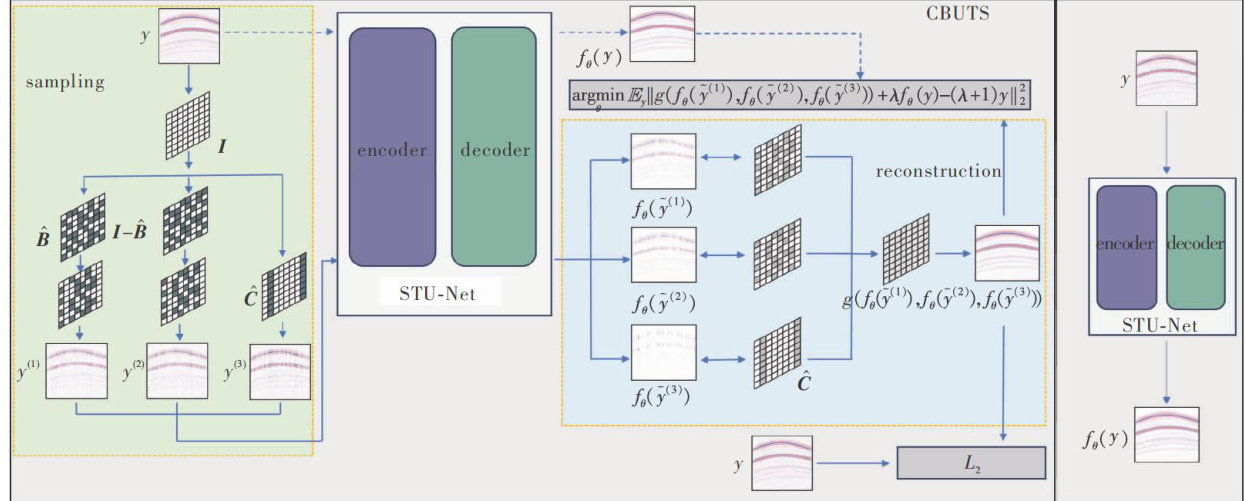
算法研究探讨 | 互补盲点策略和U型Transformer的地震数据去噪
算法研究探讨 | 互补盲点策略和U型Transformer的地震数据去噪
-

算法研究探讨 | SP-POMDP:堆叠物体抓取场景中的任务规划方法
算法研究探讨 | SP-POMDP:堆叠物体抓取场景中的任务规划方法
-
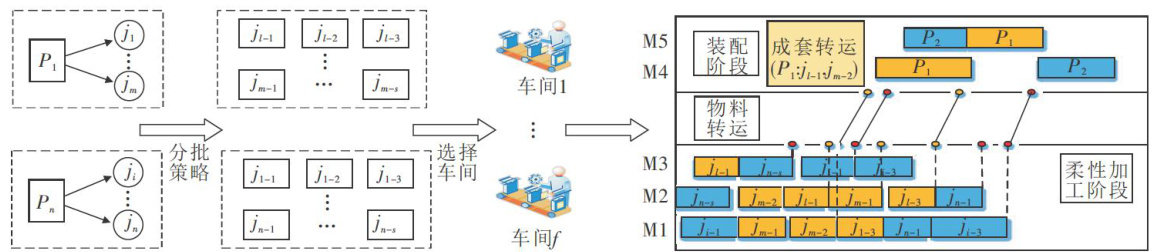
算法研究探讨 | 基于果蝇协同算法求解双目标混装柔性作业车间分批调度问题
算法研究探讨 | 基于果蝇协同算法求解双目标混装柔性作业车间分批调度问题
-

算法研究探讨 | 优化时间窗改进Dijkstra算法的无人驾驶磁悬浮车路径规划
算法研究探讨 | 优化时间窗改进Dijkstra算法的无人驾驶磁悬浮车路径规划
-

算法研究探讨 | 带频繁区域的空间并置模式挖掘方法
算法研究探讨 | 带频繁区域的空间并置模式挖掘方法
-

算法研究探讨 | 辅助任务增强的知识追踪方法
算法研究探讨 | 辅助任务增强的知识追踪方法
-
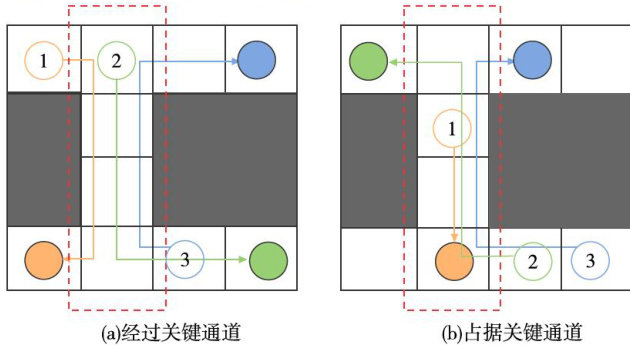
算法研究探讨 | 基于冲突避让的多智能体有效旁路规划
算法研究探讨 | 基于冲突避让的多智能体有效旁路规划
-

系统应用开发 | 基于特征融合的音频伪造检测方法
系统应用开发 | 基于特征融合的音频伪造检测方法
-
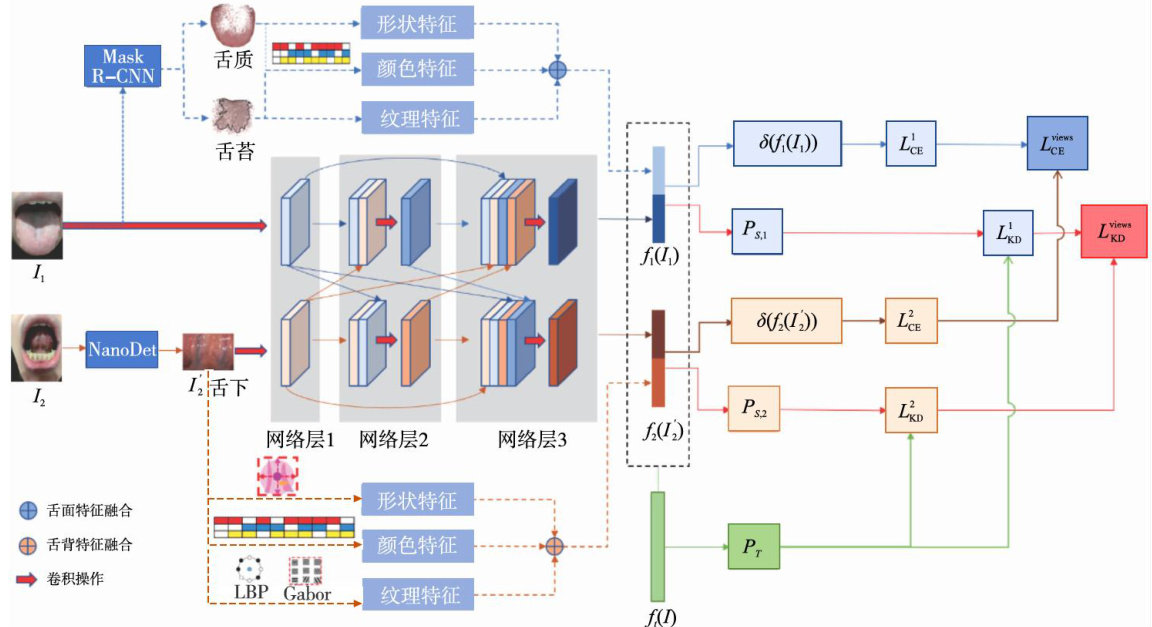
系统应用开发 | 基于多视图舌象特征融合的中医证型辨识
系统应用开发 | 基于多视图舌象特征融合的中医证型辨识
-
系统应用开发 | 多元异构耦合网络中竞争性舆情信息传播研究
系统应用开发 | 多元异构耦合网络中竞争性舆情信息传播研究
-
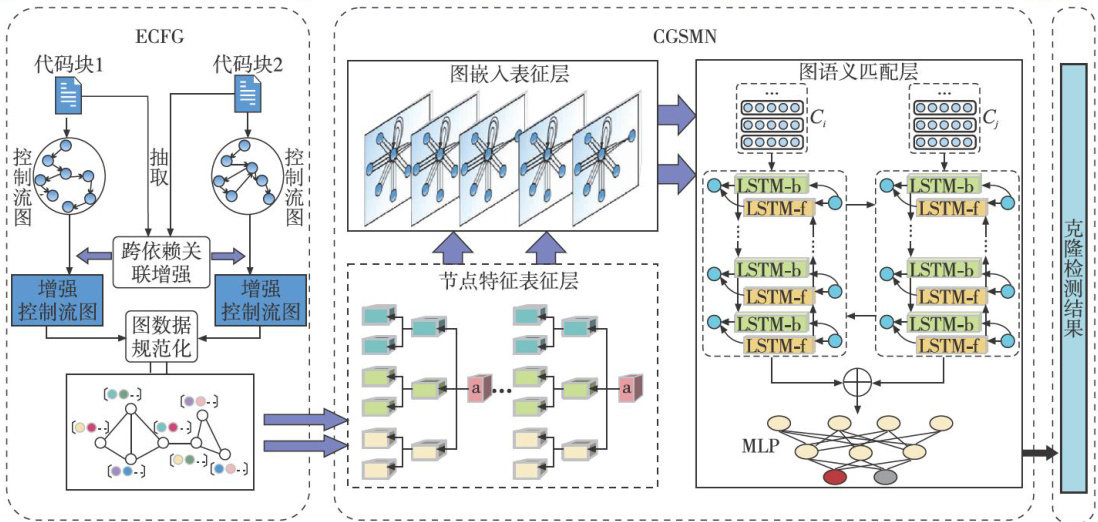
系统应用开发 | 基于增强控制流图与孪生网络架构的代码克隆检测方法
系统应用开发 | 基于增强控制流图与孪生网络架构的代码克隆检测方法
-

网络与通信技术 | 奖励回溯DQN驱动的多QoS工业网络时隙调度方法
网络与通信技术 | 奖励回溯DQN驱动的多QoS工业网络时隙调度方法
-

网络与通信技术 | 基于QUIC的拥塞控制算法动态切换机制
网络与通信技术 | 基于QUIC的拥塞控制算法动态切换机制
-
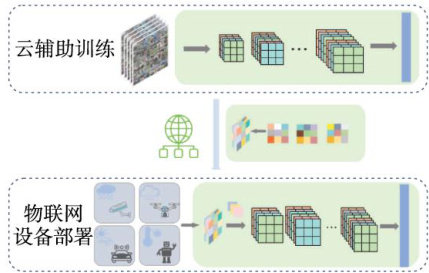
网络与通信技术 | CN2Conv:面向物联网设备的强鲁棒CNN设计方法
网络与通信技术 | CN2Conv:面向物联网设备的强鲁棒CNN设计方法
-
信息安全技术 | 面向物流数据共享的可撤销属性加密方案
信息安全技术 | 面向物流数据共享的可撤销属性加密方案
-

信息安全技术 | 一种具有多级安全目标的动态对称可搜索加密方案
信息安全技术 | 一种具有多级安全目标的动态对称可搜索加密方案
-

信息安全技术 | 基于双向数据流分析与图抽象嵌入的漏洞检测方法
信息安全技术 | 基于双向数据流分析与图抽象嵌入的漏洞检测方法
-

信息安全技术 | 基于比特切片技术与指令集的LED算法快速实现
信息安全技术 | 基于比特切片技术与指令集的LED算法快速实现
-

信息安全技术 | 基于随机投影与改进min-max哈希的可撤销指纹模板保护方案
信息安全技术 | 基于随机投影与改进min-max哈希的可撤销指纹模板保护方案
-
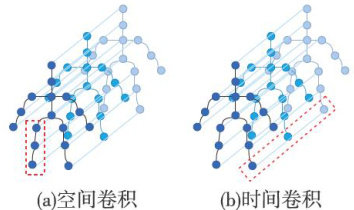
图形图像技术 | 结合自适应局部图卷积与多尺度时间建模的骨架行为识别
图形图像技术 | 结合自适应局部图卷积与多尺度时间建模的骨架行为识别
-
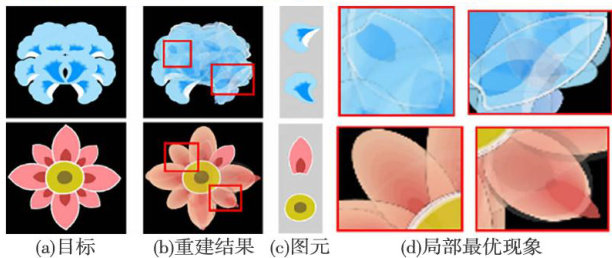
图形图像技术 | 基于图元变换的建筑彩绘纹样图像矢量化方法
图形图像技术 | 基于图元变换的建筑彩绘纹样图像矢量化方法
-

图形图像技术 | 双流特征增强与融合的弱监督时序动作定位
图形图像技术 | 双流特征增强与融合的弱监督时序动作定位
-

图形图像技术 | 多尺度降噪自编码器的遮挡行人重识别研究与应用
图形图像技术 | 多尺度降噪自编码器的遮挡行人重识别研究与应用
-
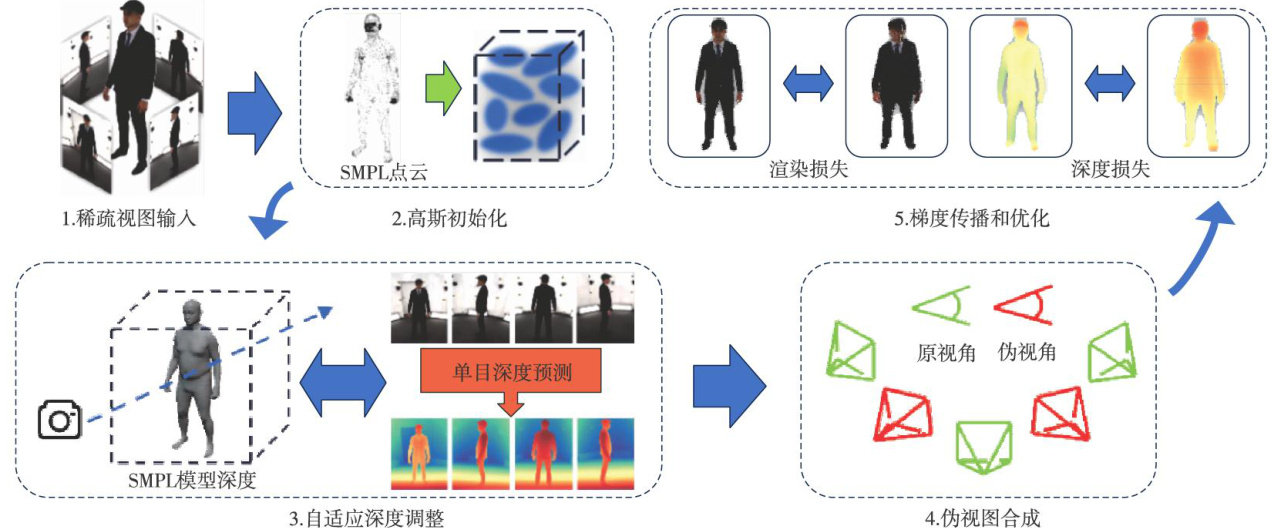
图形图像技术 | 基于深度正则化的三维高斯人体重建算法
图形图像技术 | 基于深度正则化的三维高斯人体重建算法
-
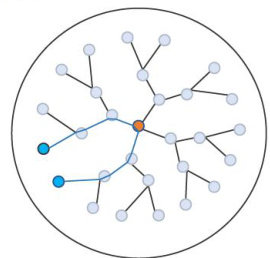
图形图像技术 | 基于双曲空间的无监督视频异常检测方法
图形图像技术 | 基于双曲空间的无监督视频异常检测方法















 登录
登录