

目录
快速导航-
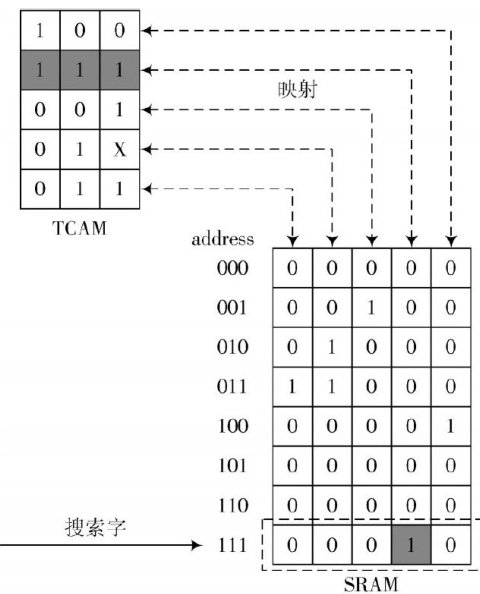
电子与信息器件 | 基于FPGA的优化型复合TCAM设计与应用
电子与信息器件 | 基于FPGA的优化型复合TCAM设计与应用
-

电子与信息器件 | 基于坐标变化的BoostPFC无模型电流控制
电子与信息器件 | 基于坐标变化的BoostPFC无模型电流控制
-
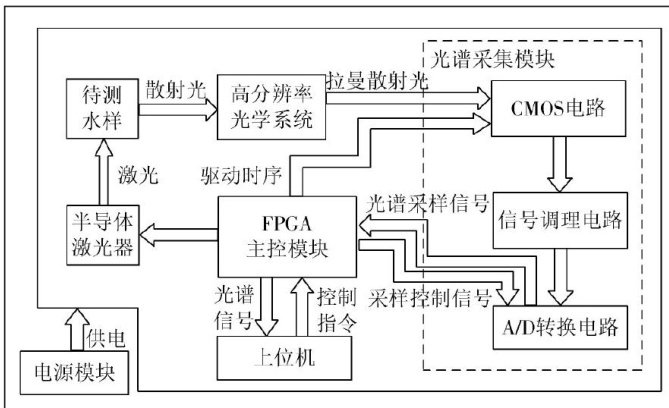
电子与信息器件 | 基于FPGA的拉曼光谱数据实时采集系统
电子与信息器件 | 基于FPGA的拉曼光谱数据实时采集系统
-
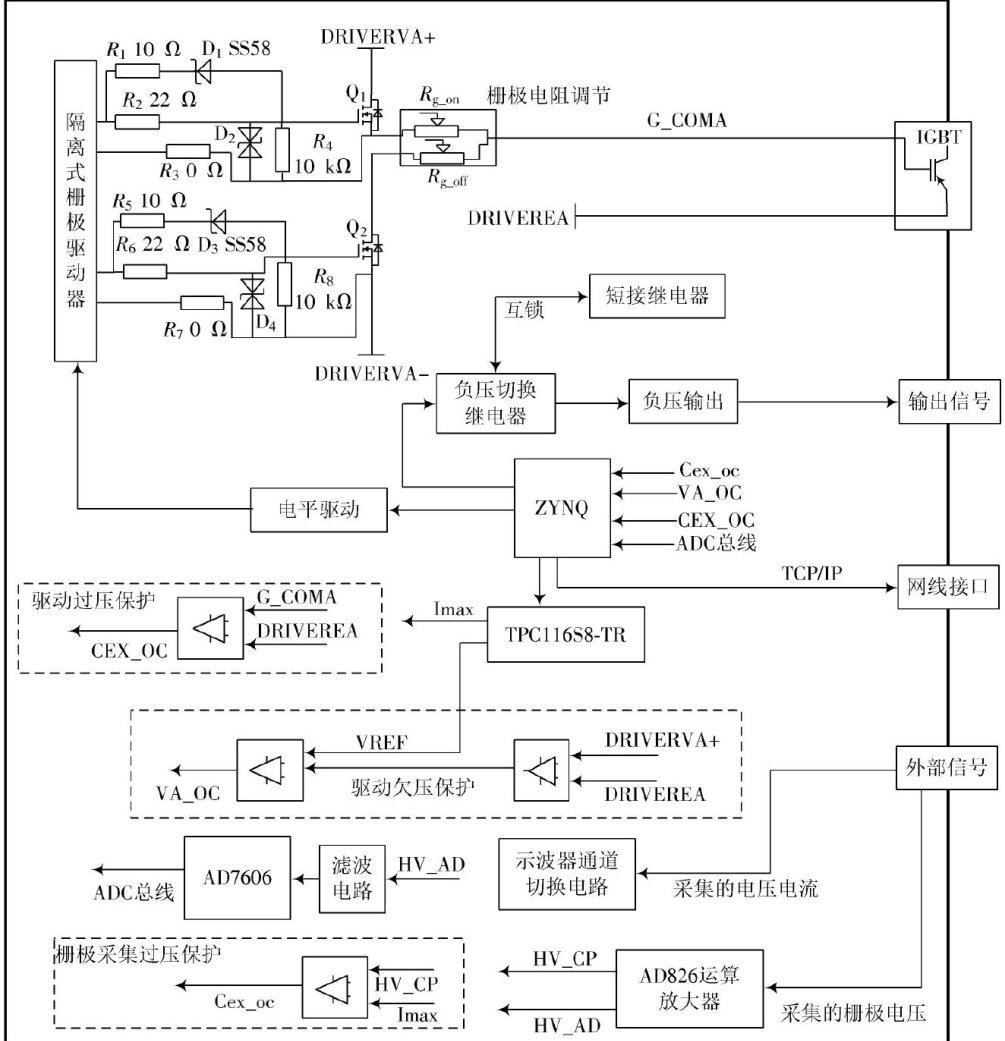
电子与信息器件 | IGBT动态测试设备的驱动电路设计
电子与信息器件 | IGBT动态测试设备的驱动电路设计
-
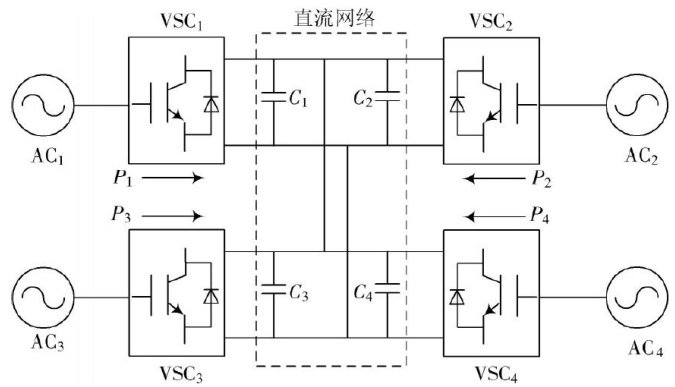
电子与信息器件 | 多端柔性直流系统改进自抗扰频率控制研究
电子与信息器件 | 多端柔性直流系统改进自抗扰频率控制研究
-
电子与信息器件 | 基于蜣螂算法优化PI双闭环SPWM逆变器的设计
电子与信息器件 | 基于蜣螂算法优化PI双闭环SPWM逆变器的设计
-
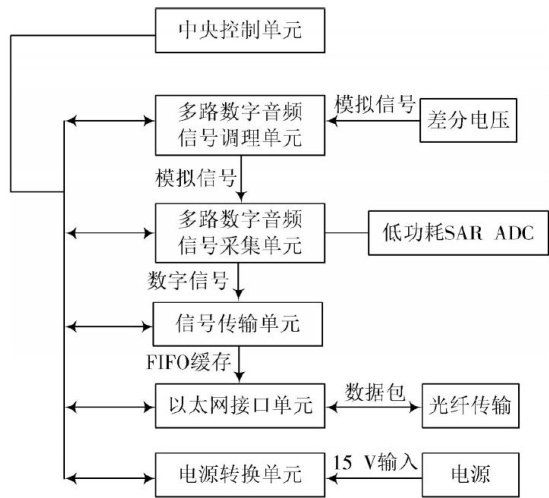
电子与信息器件 | 基于压缩感知的多路数字音频信号低功耗采集研究
电子与信息器件 | 基于压缩感知的多路数字音频信号低功耗采集研究
-
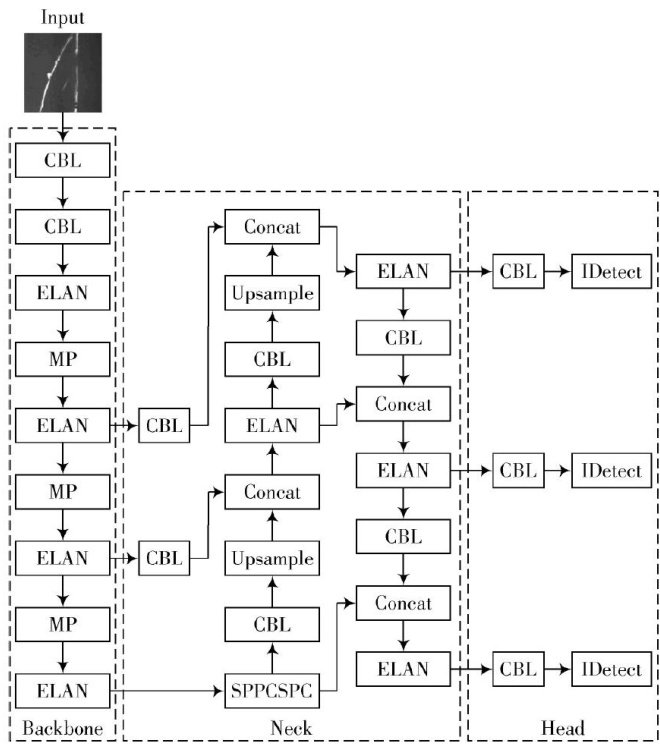
电子与信息器件 | 基于改进YOLOv7-tiny的钢材表面缺陷检测
电子与信息器件 | 基于改进YOLOv7-tiny的钢材表面缺陷检测
-
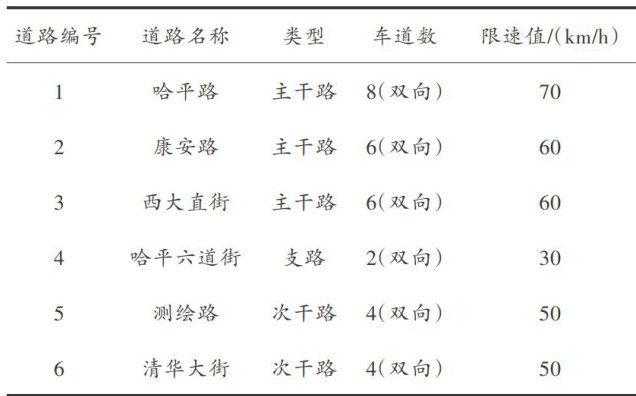
计算机科学与应用 | 基于改进Apriori算法的不良驾驶行为关联分析
计算机科学与应用 | 基于改进Apriori算法的不良驾驶行为关联分析
-
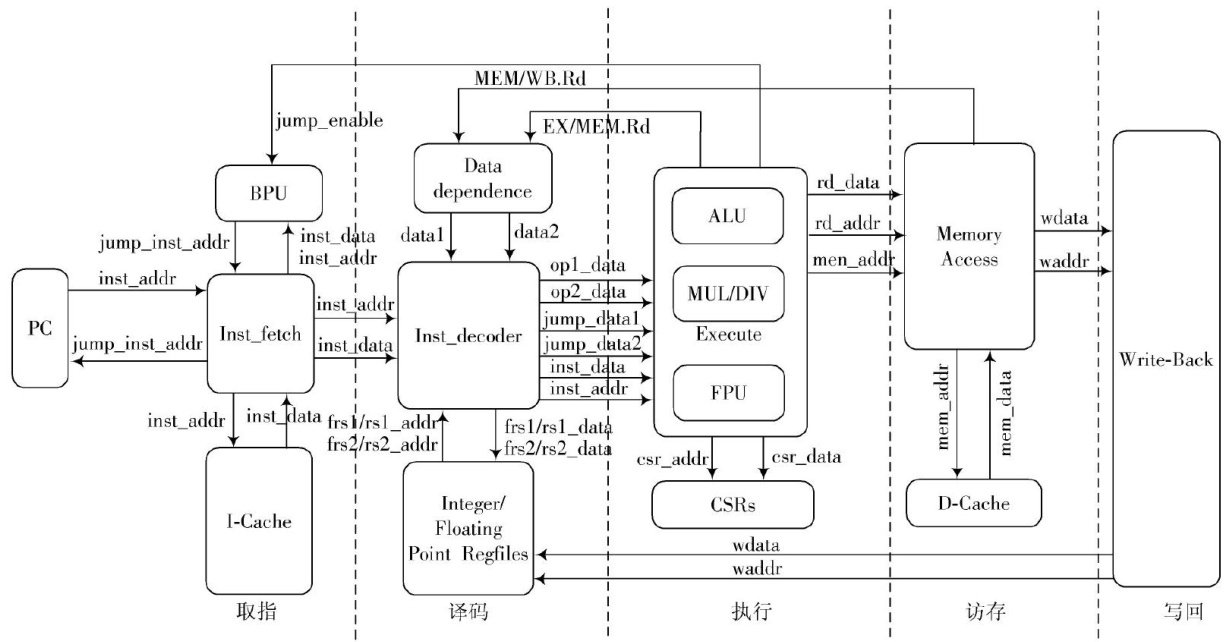
计算机科学与应用 | 基于RISC-V的五级流水线浮点SoC设计
计算机科学与应用 | 基于RISC-V的五级流水线浮点SoC设计
-

计算机科学与应用 | 基于注意力机制的深层特征融合MOOC评论情感分析
计算机科学与应用 | 基于注意力机制的深层特征融合MOOC评论情感分析
-

计算机科学与应用 | 融合多特征与半监督学习的命名实体识别研究
计算机科学与应用 | 融合多特征与半监督学习的命名实体识别研究
-
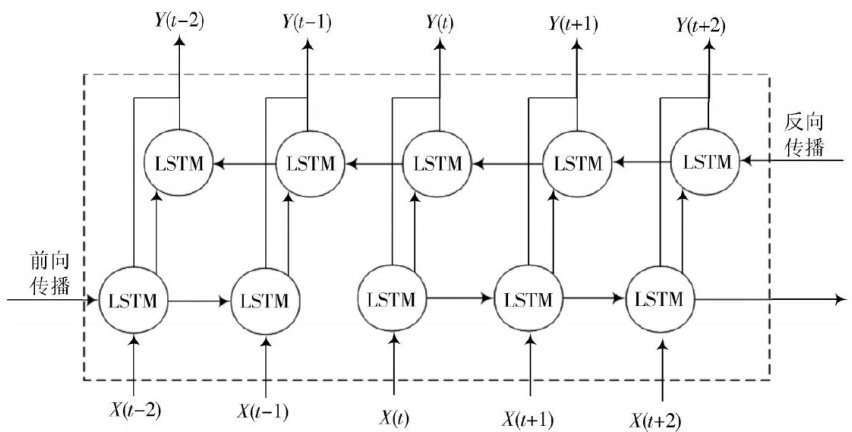
计算机科学与应用 | 基于小波降噪与WOA-Bi-LSTM的短时交通流预测
计算机科学与应用 | 基于小波降噪与WOA-Bi-LSTM的短时交通流预测
-

计算机科学与应用 | 基于多层聚类的自适应扰动匿名化算法及应用
计算机科学与应用 | 基于多层聚类的自适应扰动匿名化算法及应用
-
能源技术 | 基于MIMO无模型自适应控制的风机独立变桨距策略
能源技术 | 基于MIMO无模型自适应控制的风机独立变桨距策略
-
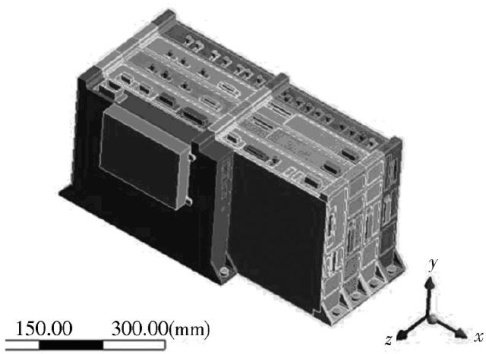
航空航天航海技术 | 星载高性能信号处理平台热设计
航空航天航海技术 | 星载高性能信号处理平台热设计
-
航空航天航海技术 | 基于STK的城市场景下无人机航路导航性能仿真分析
航空航天航海技术 | 基于STK的城市场景下无人机航路导航性能仿真分析
-

前沿交叉科学 | 融合汉字结构和边界增强的嵌套命名实体识别方法
前沿交叉科学 | 融合汉字结构和边界增强的嵌套命名实体识别方法
-
前沿交叉科学 | 基于机器学习的油藏动态分析研究
前沿交叉科学 | 基于机器学习的油藏动态分析研究
-

前沿交叉科学 | 融合条形卷积和Transformer的风机叶片裂纹检测研究
前沿交叉科学 | 融合条形卷积和Transformer的风机叶片裂纹检测研究
-

前沿交叉科学 | 基于HGNN和多尺度特征融合的弱监督人群计数方法
前沿交叉科学 | 基于HGNN和多尺度特征融合的弱监督人群计数方法
-

前沿交叉科学 | 基于用户数据特征深度挖掘的快速图书检索算法
前沿交叉科学 | 基于用户数据特征深度挖掘的快速图书检索算法
-
前沿交叉科学 | 改进A\*与DWA融合算法的无人车路径规划研究
前沿交叉科学 | 改进A\*与DWA融合算法的无人车路径规划研究
-
人工智能 | 多机器人系统虚拟仿真实验教学平台设计与实现
人工智能 | 多机器人系统虚拟仿真实验教学平台设计与实现
-

人工智能 | 可变光照下多姿态人脸表情识别方法
人工智能 | 可变光照下多姿态人脸表情识别方法
-
人工智能 | 群智能算法优化改进随机森林算法的井漏预测
人工智能 | 群智能算法优化改进随机森林算法的井漏预测
-
人工智能 | 基于改进YOLOv8的小目标检测算法
人工智能 | 基于改进YOLOv8的小目标检测算法
-
人工智能 | 基于关键点的列车螺栓松动状态检测算法研究
人工智能 | 基于关键点的列车螺栓松动状态检测算法研究
 值和mIoU值分别达到 86.87% 和 79.54% ,且网络的训练速率达到13.24幅/s,说明风机叶片裂纹检测方法在检测性能与检测速率上均具有良好的效果。
值和mIoU值分别达到 86.87% 和 79.54% ,且网络的训练速率达到13.24幅/s,说明风机叶片裂纹检测方法在检测性能与检测速率上均具有良好的效果。过往期刊
更多-

现代电子技术
2025年24期 -

现代电子技术
2025年23期 -

现代电子技术
2025年22期 -

现代电子技术
2025年21期 -

现代电子技术
2025年20期 -

现代电子技术
2025年19期 -

现代电子技术
2025年18期 -

现代电子技术
2025年17期 -

现代电子技术
2025年16期 -

现代电子技术
2025年15期 -

现代电子技术
2025年14期 -

现代电子技术
2025年13期 -

现代电子技术
2025年12期 -

现代电子技术
2025年11期 -

现代电子技术
2025年10期 -

现代电子技术
2025年09期 -

现代电子技术
2025年08期 -

现代电子技术
2025年07期 -

现代电子技术
2025年06期 -

现代电子技术
2025年05期 -

现代电子技术
2025年04期 -

现代电子技术
2025年03期 -

现代电子技术
2025年02期 -

现代电子技术
2025年01期









 登录
登录