
目录
快速导航-

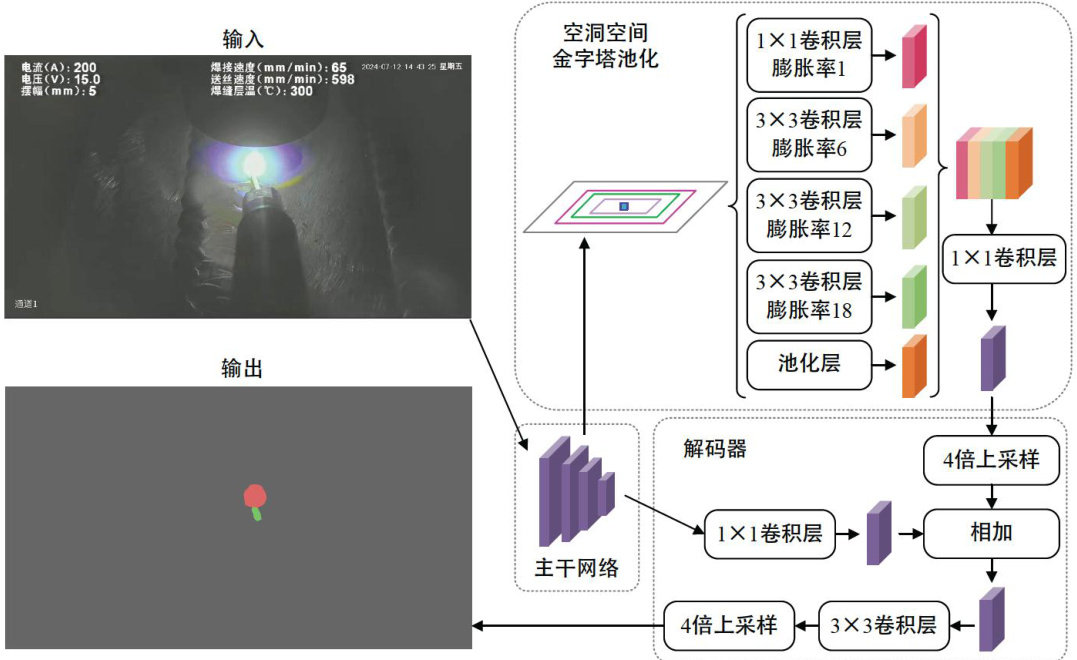
设计与研究 | 非对称的编码器-解码器架构下图像分割方法研究
设计与研究 | 非对称的编码器-解码器架构下图像分割方法研究
-
设计与研究 | 基于Archard理论的航空发动机零件磨损研究
设计与研究 | 基于Archard理论的航空发动机零件磨损研究
-
设计与研究 | 基于离散元仿真的椭圆柱状筒体长宽比变化对球磨机研磨效率的影响研究
设计与研究 | 基于离散元仿真的椭圆柱状筒体长宽比变化对球磨机研磨效率的影响研究
-

设计与研究 | 联合Kano模型与眼动测定的车载虚拟仪表可识别性设计与评价
设计与研究 | 联合Kano模型与眼动测定的车载虚拟仪表可识别性设计与评价
-

交通工程技术 | 基于声信号的VMD结合PSO-SVM车轮磨耗识别方法研究
交通工程技术 | 基于声信号的VMD结合PSO-SVM车轮磨耗识别方法研究
-
交通工程技术 | 地铁停车场上盖结构车致振动试验研究
交通工程技术 | 地铁停车场上盖结构车致振动试验研究
-

交通工程技术 | 基于频响函数的转向架构架模态匹配研究
交通工程技术 | 基于频响函数的转向架构架模态匹配研究
-

交通工程技术 | 多倍数使用钎焊片时钢轨打磨复合砂轮回转性能研究
交通工程技术 | 多倍数使用钎焊片时钢轨打磨复合砂轮回转性能研究
-
智能制造 | 基于机器视觉的焊接偏弧检测方法研究
智能制造 | 基于机器视觉的焊接偏弧检测方法研究
-
智能制造 | 基于BP神经网络的铝合金薄壁件加工变形预测研究
智能制造 | 基于BP神经网络的铝合金薄壁件加工变形预测研究
-
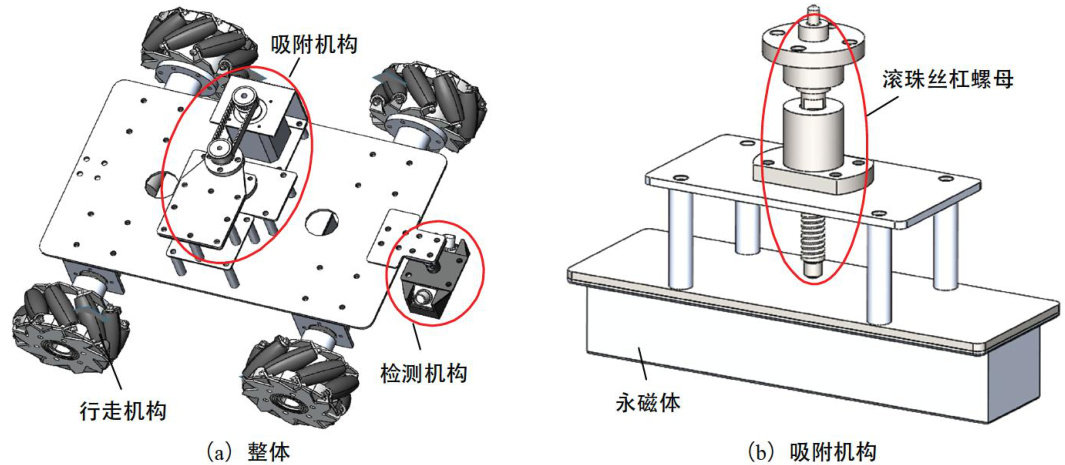
机器人技术 | 永磁吸附储罐爬壁机器人吸附特性研究
机器人技术 | 永磁吸附储罐爬壁机器人吸附特性研究
 ,该模型能够在显著减少计算量的同时,保持优良的分割精度,从而满足实时应用需求。
,该模型能够在显著减少计算量的同时,保持优良的分割精度,从而满足实时应用需求。 型钢轨打磨复合砂轮模型,并分别对各模型进行回转性能模拟仿真,求解在钎焊片不同角度时的复合砂轮表面回转应力与形变量、钎焊片回转应力与形变量。结果表明,以钎焊片平行砂轮半径时的角度为对称轴,随着钎焊片放置角度的不同,砂轮表面应力与形变量呈现出对称性变化规律。砂轮表面最大应力变化范围在 11.9~12.4MPa ;砂轮表面最小应力范围在 1.13~1.29MPa 而钎焊片的放置角度对砂轮表面最大形变量的影响较小。砂轮内部钎焊片上回转应力值明显高于砂轮表面应力值,但位移量受到砂轮本身的明显约束。复合砂轮制作中钎焊片的较优放置角度为 60° 和 120° 。
型钢轨打磨复合砂轮模型,并分别对各模型进行回转性能模拟仿真,求解在钎焊片不同角度时的复合砂轮表面回转应力与形变量、钎焊片回转应力与形变量。结果表明,以钎焊片平行砂轮半径时的角度为对称轴,随着钎焊片放置角度的不同,砂轮表面应力与形变量呈现出对称性变化规律。砂轮表面最大应力变化范围在 11.9~12.4MPa ;砂轮表面最小应力范围在 1.13~1.29MPa 而钎焊片的放置角度对砂轮表面最大形变量的影响较小。砂轮内部钎焊片上回转应力值明显高于砂轮表面应力值,但位移量受到砂轮本身的明显约束。复合砂轮制作中钎焊片的较优放置角度为 60° 和 120° 。











 登录
登录