
目录
快速导航-
信号分析与图像处理 | 基于自编码器和Fisher矢量编码的人脸防伪检测研究
信号分析与图像处理 | 基于自编码器和Fisher矢量编码的人脸防伪检测研究
-
信号分析与图像处理 | 改进YOLO的钢材表面缺陷检测算法
信号分析与图像处理 | 改进YOLO的钢材表面缺陷检测算法
-
信号分析与图像处理 | 基于K⁃SVD算法的数字图像自适应修复方法
信号分析与图像处理 | 基于K⁃SVD算法的数字图像自适应修复方法
-

信号分析与图像处理 | 噪声环境中多轨道数字音频信号降噪方法
信号分析与图像处理 | 噪声环境中多轨道数字音频信号降噪方法
-
信号分析与图像处理 | 亚像素级数字图像弱边缘小目标快速检测算法
信号分析与图像处理 | 亚像素级数字图像弱边缘小目标快速检测算法
-
信号分析与图像处理 | 一种采用改进Canny算子的机械臂识别与定位算法设计
信号分析与图像处理 | 一种采用改进Canny算子的机械臂识别与定位算法设计
-
信号分析与图像处理 | 基于SORT算法的图像轨迹跟踪混合控制方法
信号分析与图像处理 | 基于SORT算法的图像轨迹跟踪混合控制方法
-
信号分析与图像处理 | 基于Swin Transformer和卷积注意力的乳腺癌病理图像诊断研究
信号分析与图像处理 | 基于Swin Transformer和卷积注意力的乳腺癌病理图像诊断研究
-
信号分析与图像处理 | 基于张量Tucker分解的高光谱图像异常目标识别
信号分析与图像处理 | 基于张量Tucker分解的高光谱图像异常目标识别
-
通信与信息工程 | 基于全并行深度Q网络的通信干扰资源快速分配算法
通信与信息工程 | 基于全并行深度Q网络的通信干扰资源快速分配算法
-
通信与信息工程 | 基于DEABC算法的EH⁃CRAIoT的资源分配算法研究
通信与信息工程 | 基于DEABC算法的EH⁃CRAIoT的资源分配算法研究
-
通信与信息工程 | 非正交多址接入异构网络用户公平性问题研究
通信与信息工程 | 非正交多址接入异构网络用户公平性问题研究
-
通信与信息工程 | 椭圆函数低通滤波器在机载天线中的应用
通信与信息工程 | 椭圆函数低通滤波器在机载天线中的应用
-
通信与信息工程 | 基于扩展卡尔曼滤波的交互式多模型跟踪算法研究
通信与信息工程 | 基于扩展卡尔曼滤波的交互式多模型跟踪算法研究
-
通信与信息工程 | 复杂弹道场景多维数据关联技术
通信与信息工程 | 复杂弹道场景多维数据关联技术
-
网络与信息安全 | 改进Petri网下异构跨域用户身份验证方法
网络与信息安全 | 改进Petri网下异构跨域用户身份验证方法
-
网络与信息安全 | 基于改进ResNet50的钨矿石双能X射线图像分选方法
网络与信息安全 | 基于改进ResNet50的钨矿石双能X射线图像分选方法
-
网络与信息安全 | 基于节点路径重构和ELM的无线通信网络DDoS攻击源追踪
网络与信息安全 | 基于节点路径重构和ELM的无线通信网络DDoS攻击源追踪
-

网络与信息安全 | 属性Logistic混沌映射下的物联网隐私数据安全共享
网络与信息安全 | 属性Logistic混沌映射下的物联网隐私数据安全共享
-

电子技术及应用 | 基于球面角点特征的鱼眼相机与激光雷达联合标定方法
电子技术及应用 | 基于球面角点特征的鱼眼相机与激光雷达联合标定方法
-
电子技术及应用 | 弱电网下考虑数字控制延时的LCL并网逆变器改进WAC控制策略
电子技术及应用 | 弱电网下考虑数字控制延时的LCL并网逆变器改进WAC控制策略
-
电子技术及应用 | 复杂环境下基于视觉/惯性的单兵自主定位性能评估
电子技术及应用 | 复杂环境下基于视觉/惯性的单兵自主定位性能评估
-

电子技术及应用 | 低空自主无人机数字孪生系统设计
电子技术及应用 | 低空自主无人机数字孪生系统设计
-
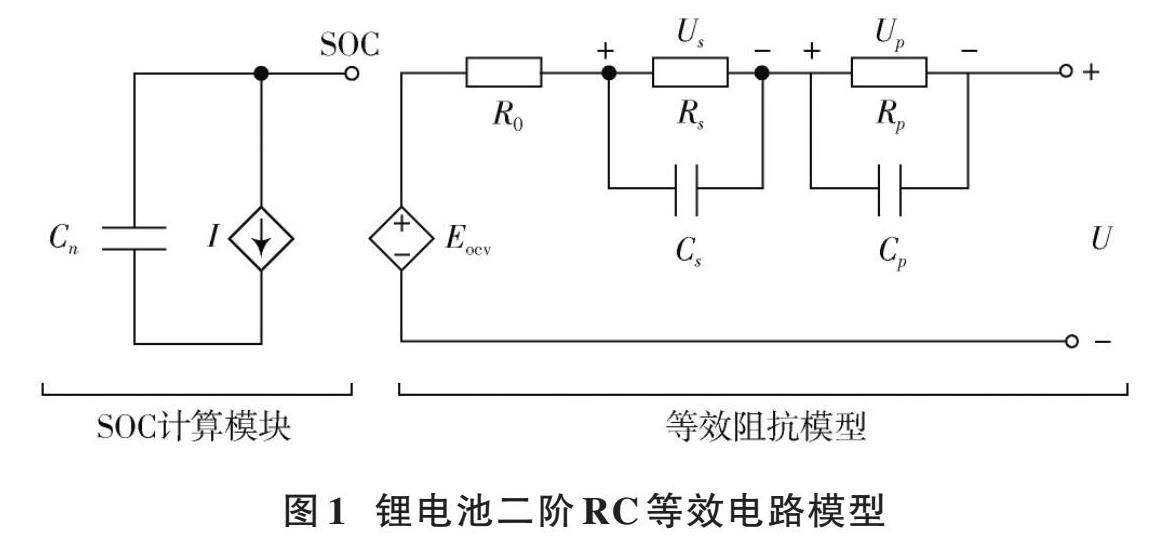
电子技术及应用 | 基于高阶EKF的锂电池SOC测算精度研究
电子技术及应用 | 基于高阶EKF的锂电池SOC测算精度研究
-
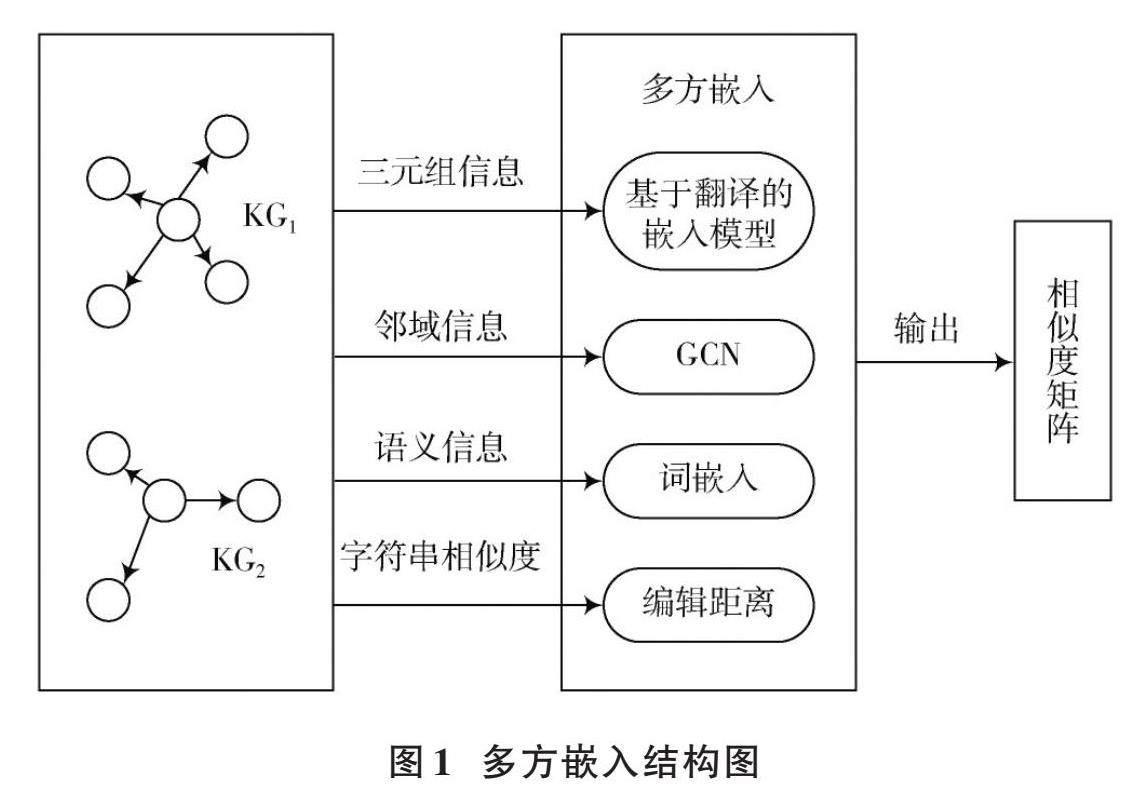
电子技术及应用 | 基于多方嵌入的逐步实体对齐方法
电子技术及应用 | 基于多方嵌入的逐步实体对齐方法
-
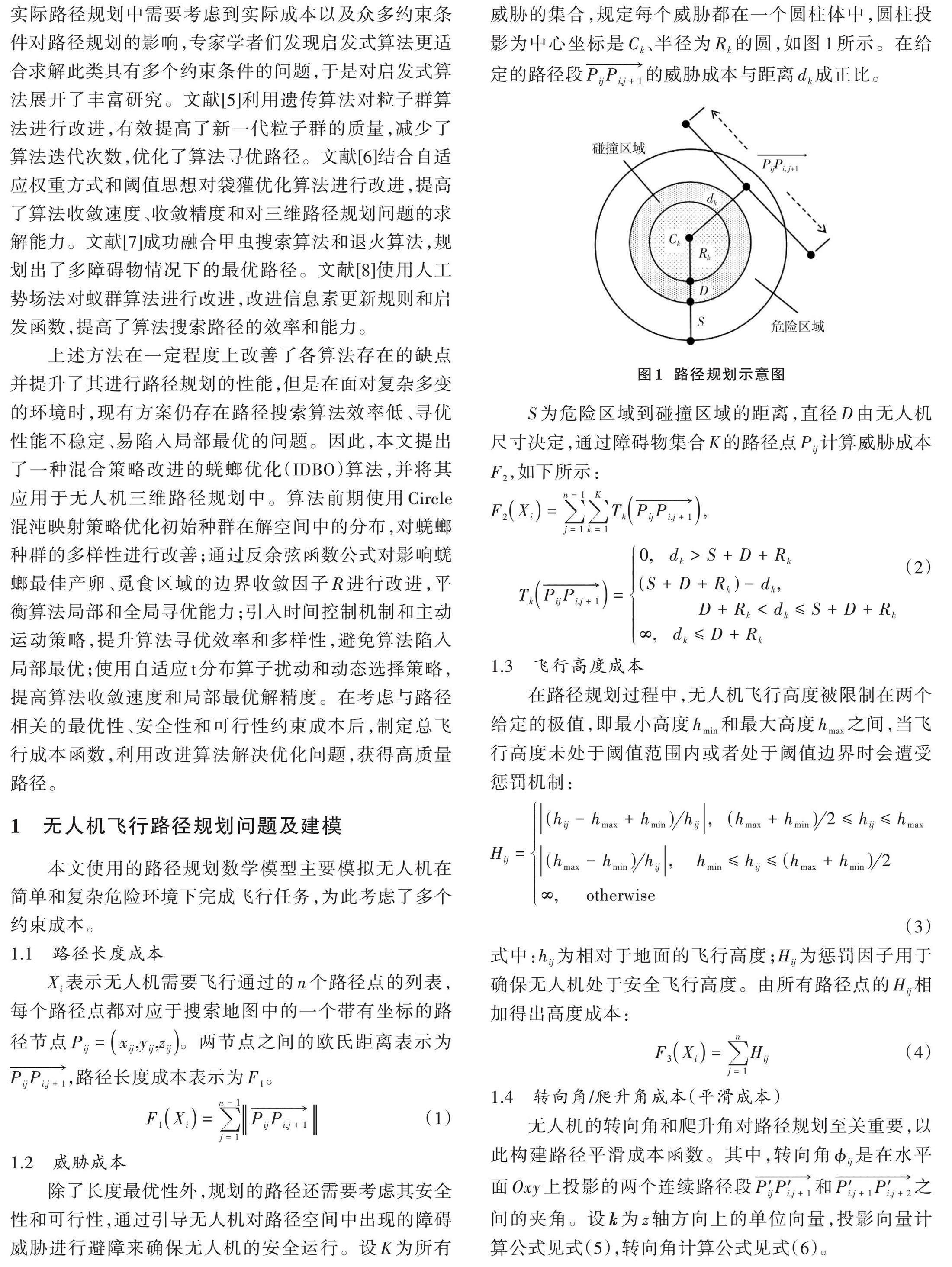
测控与自动化技术 | 基于混合策略改进蜣螂优化算法的无人机三维路径规划
测控与自动化技术 | 基于混合策略改进蜣螂优化算法的无人机三维路径规划
-
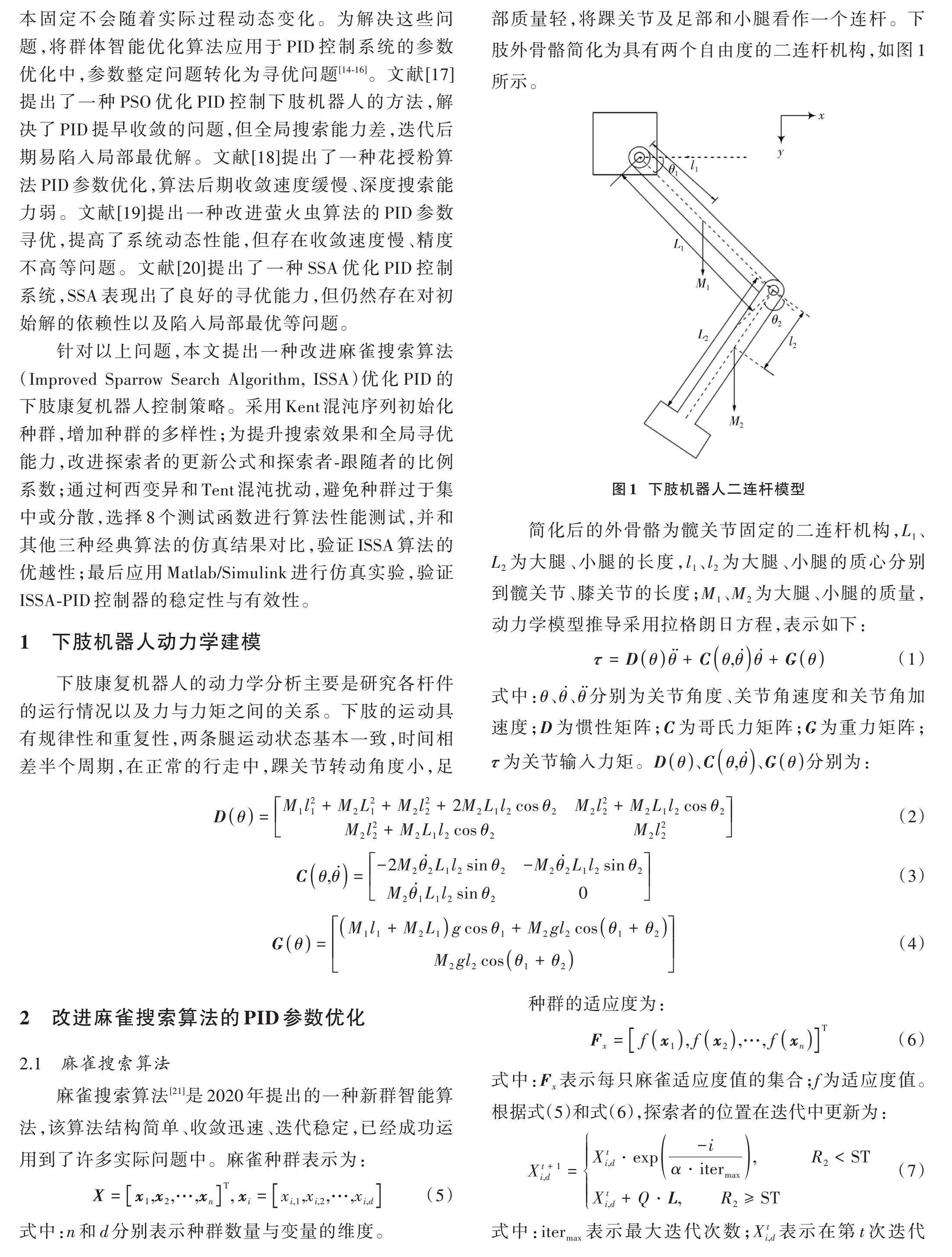
测控与自动化技术 | 基于改进SSA优化PID的下肢康复机器人控制
测控与自动化技术 | 基于改进SSA优化PID的下肢康复机器人控制
-
测控与自动化技术 | 改进YOLO⁃DETR的布料表面微小损伤检测方法
测控与自动化技术 | 改进YOLO⁃DETR的布料表面微小损伤检测方法
-
测控与自动化技术 | 基于改进YOLOv7⁃tiny的高空作业人员安防装备检测算法
测控与自动化技术 | 基于改进YOLOv7⁃tiny的高空作业人员安防装备检测算法
-
测控与自动化技术 | 基于golang微服务的库房智能管理系统设计
测控与自动化技术 | 基于golang微服务的库房智能管理系统设计
-
能源与环境科学 | 面向居民家庭智慧用能的随器量测模块设计与应用
能源与环境科学 | 面向居民家庭智慧用能的随器量测模块设计与应用
过往期刊
更多-

现代电子技术
2024年24期 -

现代电子技术
2024年23期 -

现代电子技术
2024年22期 -

现代电子技术
2024年21期 -

现代电子技术
2024年20期 -

现代电子技术
2024年19期 -

现代电子技术
2024年18期 -

现代电子技术
2024年17期 -

现代电子技术
2024年16期 -

现代电子技术
2024年15期 -

现代电子技术
2024年14期 -

现代电子技术
2024年13期 -

现代电子技术
2024年12期 -

现代电子技术
2024年11期 -

现代电子技术
2024年10期 -

现代电子技术
2024年09期 -

现代电子技术
2024年08期 -

现代电子技术
2024年07期 -

现代电子技术
2024年06期 -

现代电子技术
2024年05期 -

现代电子技术
2024年04期 -

现代电子技术
2024年03期 -

现代电子技术
2024年02期 -

现代电子技术
2024年01期









 登录
登录