
目录
快速导航-
特别专栏:智能车辆操纵与控制 | 面向智能车辆的路面凹凸障碍物识别方法研究
特别专栏:智能车辆操纵与控制 | 面向智能车辆的路面凹凸障碍物识别方法研究
-
特别专栏:智能车辆操纵与控制 | 计及质心侧偏角动态自适应的无人驾驶汽车横坡弯道跟踪控制
特别专栏:智能车辆操纵与控制 | 计及质心侧偏角动态自适应的无人驾驶汽车横坡弯道跟踪控制
-

特别专栏:智能车辆操纵与控制 | 基于鲸鱼优化算法支持向量回归的汽车运动状态估计
特别专栏:智能车辆操纵与控制 | 基于鲸鱼优化算法支持向量回归的汽车运动状态估计
-
特别专栏:智能车辆操纵与控制 | 自动驾驶电动车辆基于参数预测的径向基函数神经网络自适应控制
特别专栏:智能车辆操纵与控制 | 自动驾驶电动车辆基于参数预测的径向基函数神经网络自适应控制
-
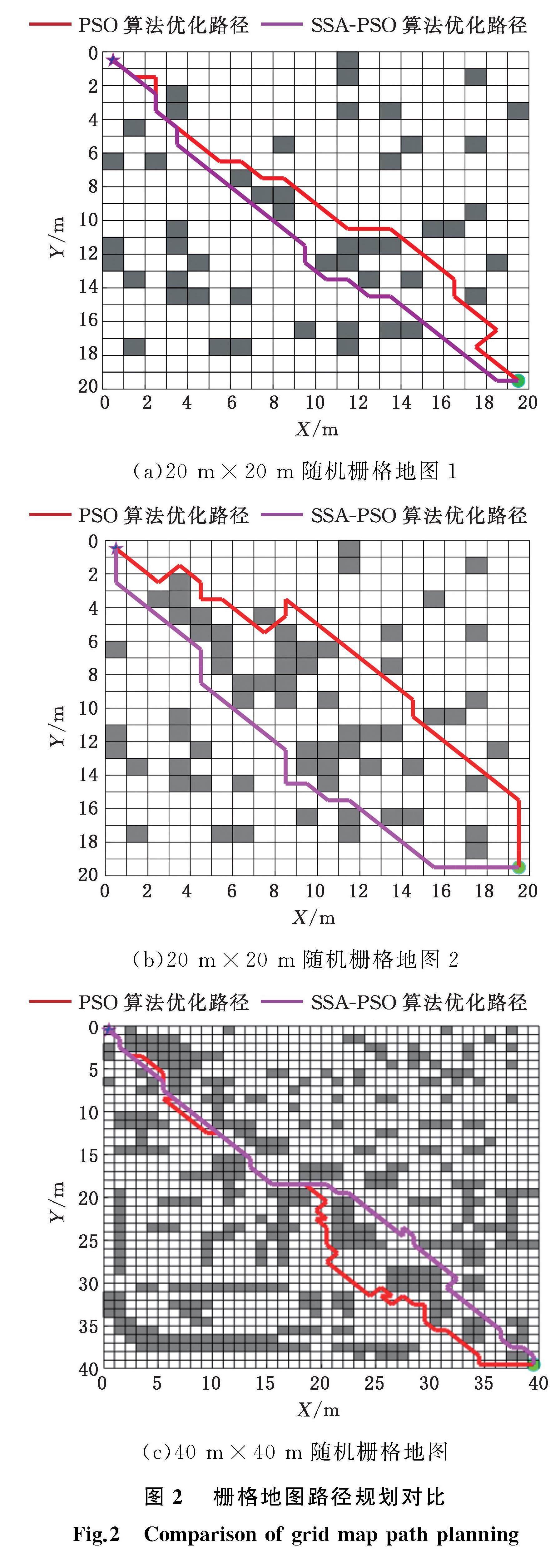
特别专栏:智能车辆操纵与控制 | 麻雀搜索算法-粒子群算法与快速扩展随机树算法协同优化的智能车辆路径规划
特别专栏:智能车辆操纵与控制 | 麻雀搜索算法-粒子群算法与快速扩展随机树算法协同优化的智能车辆路径规划
-
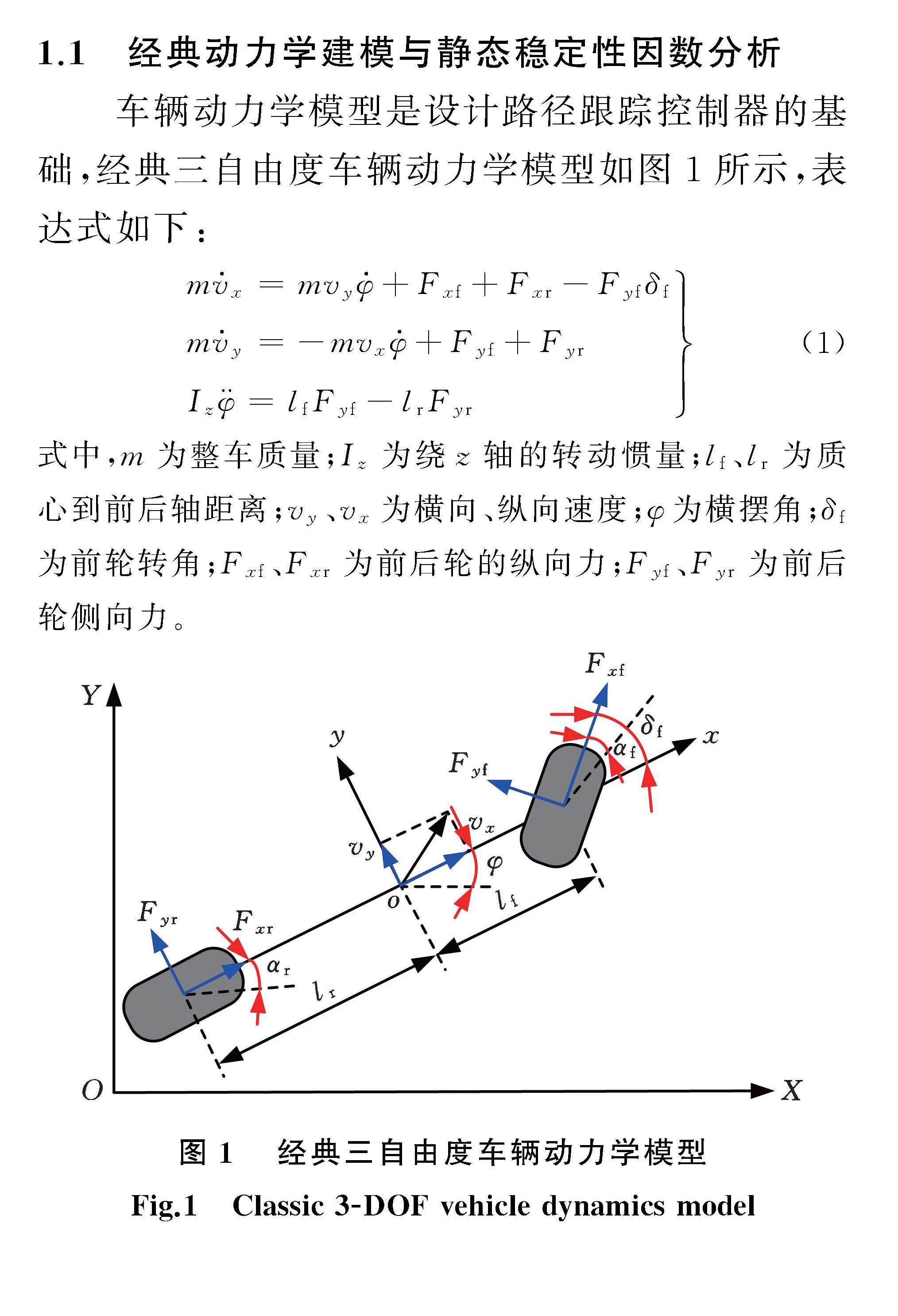
特别专栏:智能车辆操纵与控制 | 基于优化动力学模型的路径跟踪控制研究
特别专栏:智能车辆操纵与控制 | 基于优化动力学模型的路径跟踪控制研究
-
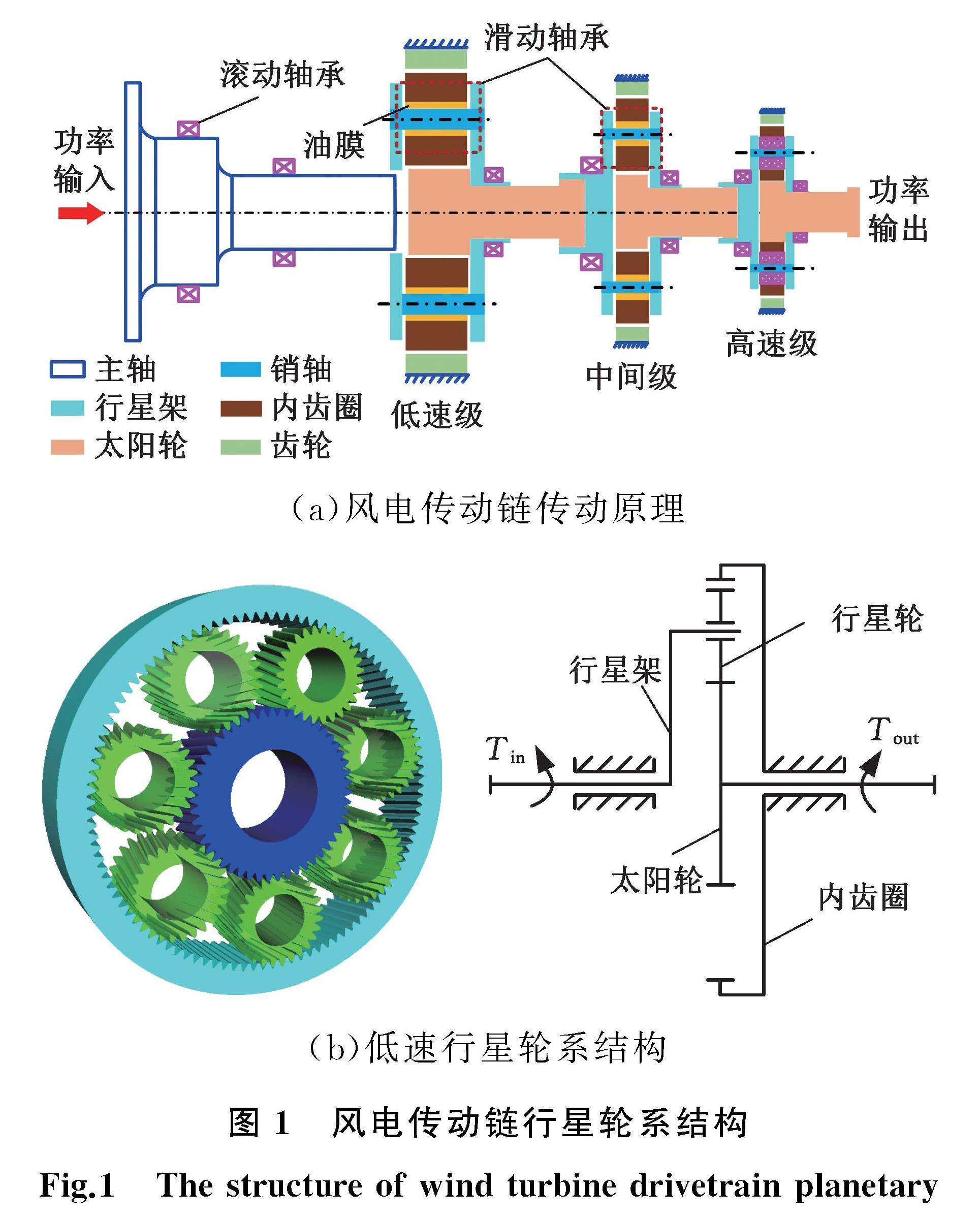
机械基础工程 | 斜齿轮啮合弯矩对风电齿轮箱行星轮滑动轴承瞬态润滑性能影响分析
机械基础工程 | 斜齿轮啮合弯矩对风电齿轮箱行星轮滑动轴承瞬态润滑性能影响分析
-
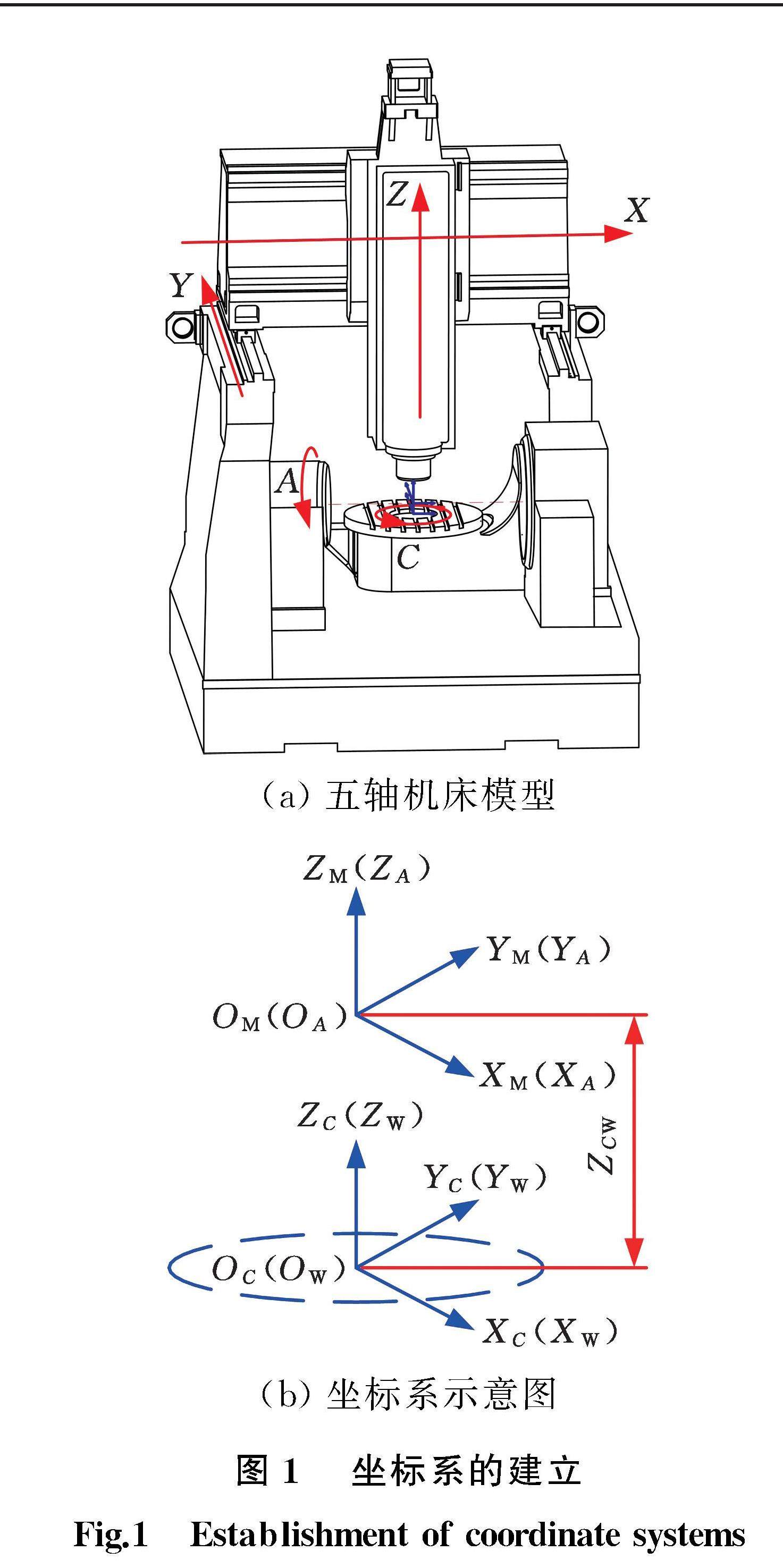
机械基础工程 | 双转台五轴数控机床旋转轴位置无关几何误差辨识
机械基础工程 | 双转台五轴数控机床旋转轴位置无关几何误差辨识
-
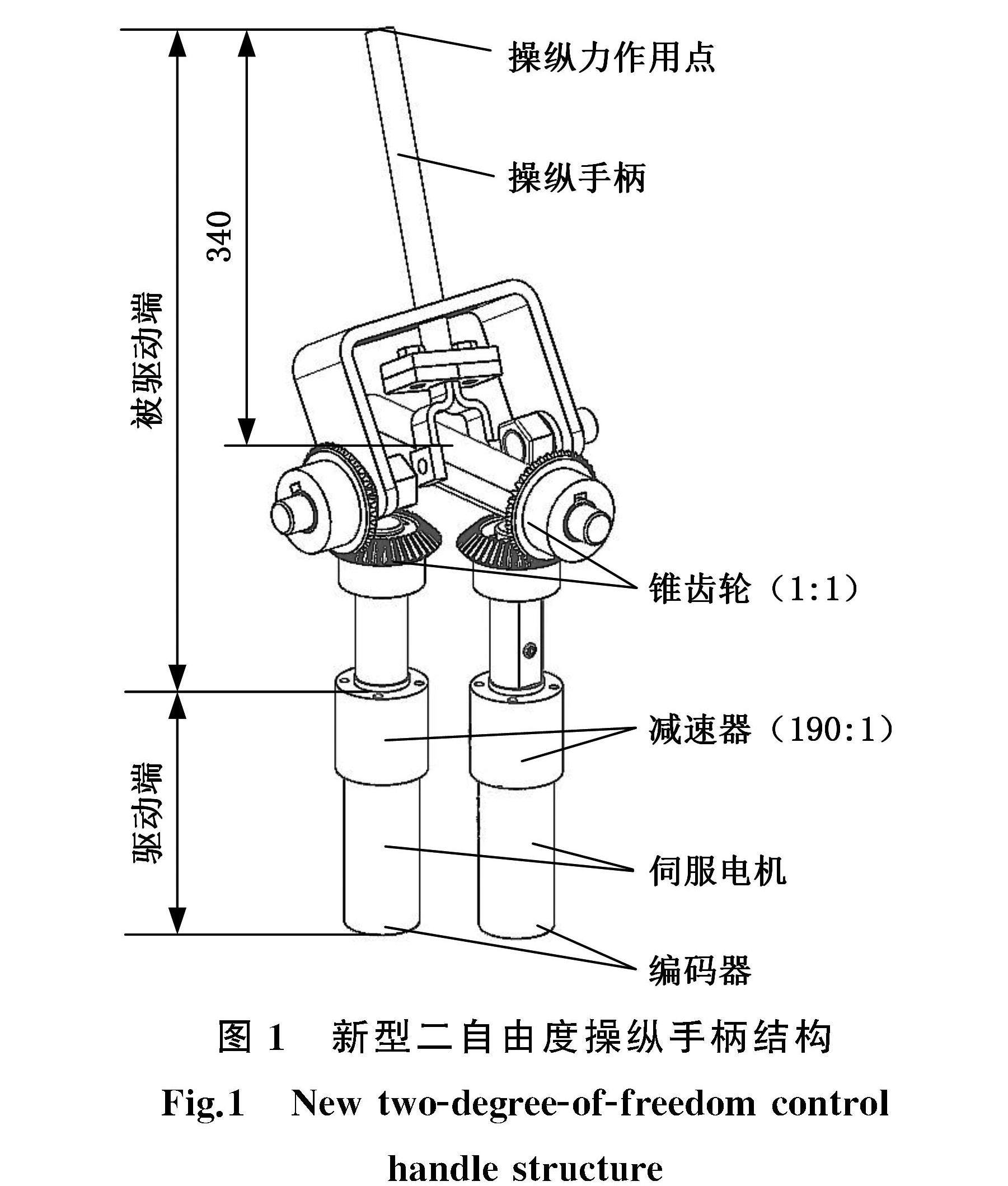
机械基础工程 | 无力传感器的操纵手柄自适应变阻抗控制
机械基础工程 | 无力传感器的操纵手柄自适应变阻抗控制
-
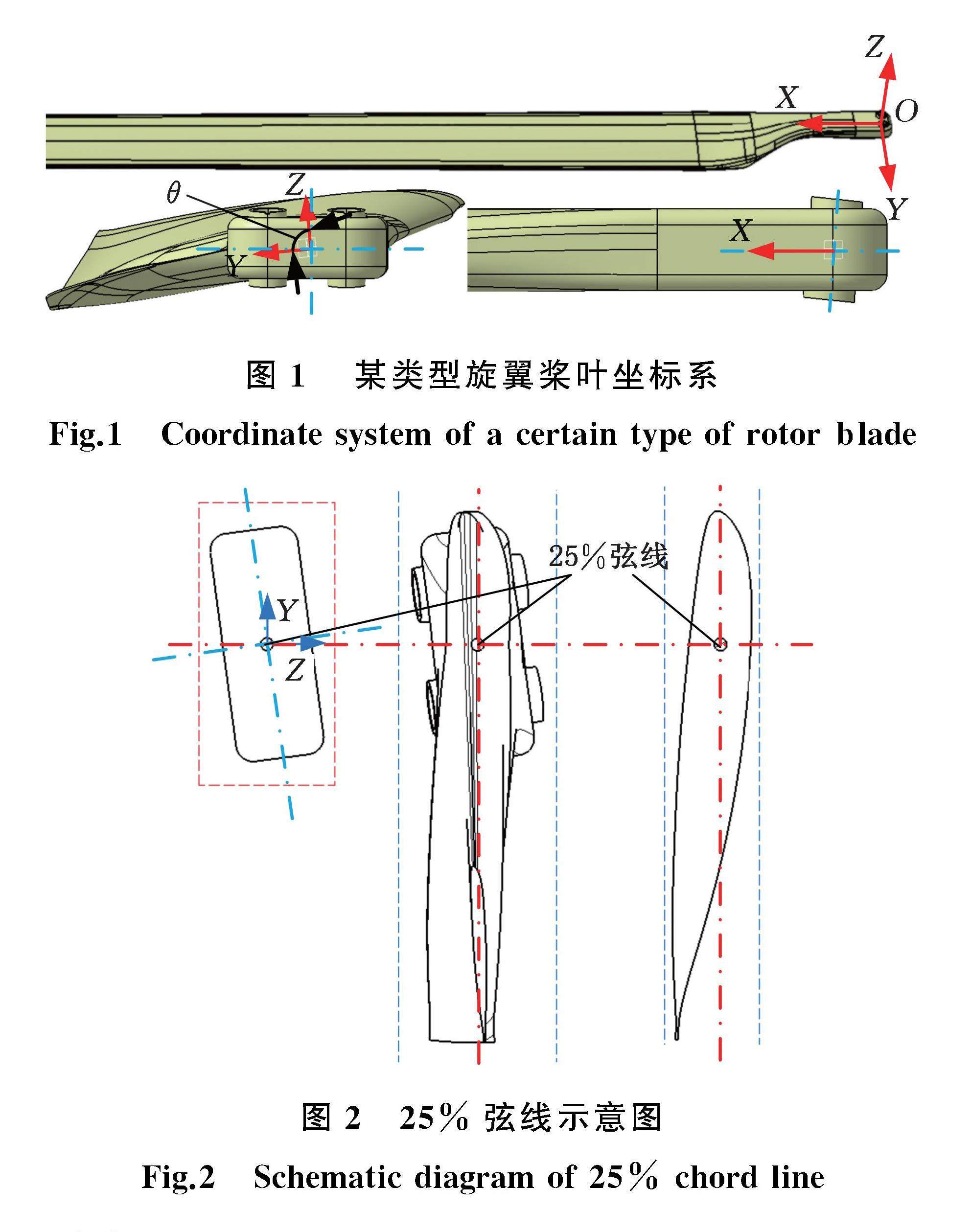
机械基础工程 | 旋翼桨叶扭角的数字化柔性检测方法
机械基础工程 | 旋翼桨叶扭角的数字化柔性检测方法
-

智能制造 | 基于VDM-SSA-LSTM考虑刀具磨损的数控铣床切削功率预测模型研究
智能制造 | 基于VDM-SSA-LSTM考虑刀具磨损的数控铣床切削功率预测模型研究
-
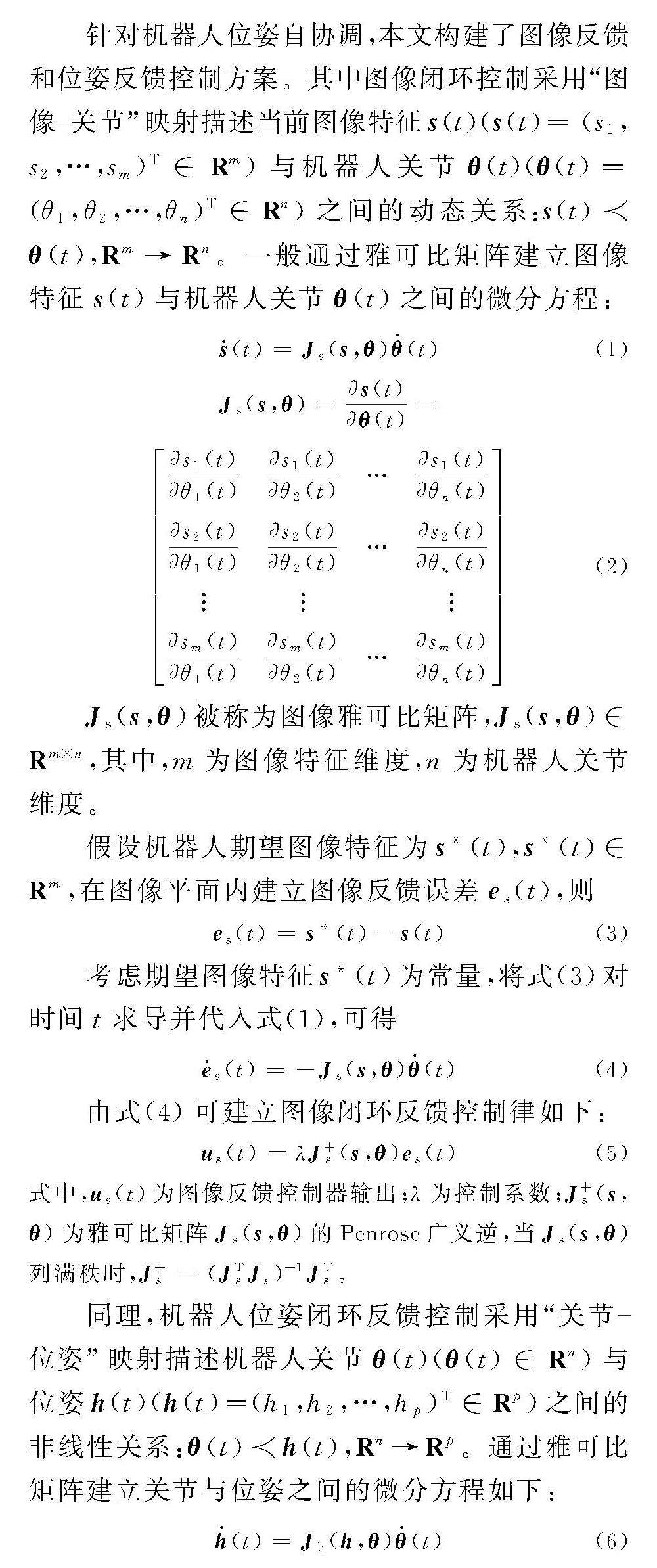
智能制造 | 二阶锥约束规划的机器人视觉闭环位姿自协调方法
智能制造 | 二阶锥约束规划的机器人视觉闭环位姿自协调方法
-
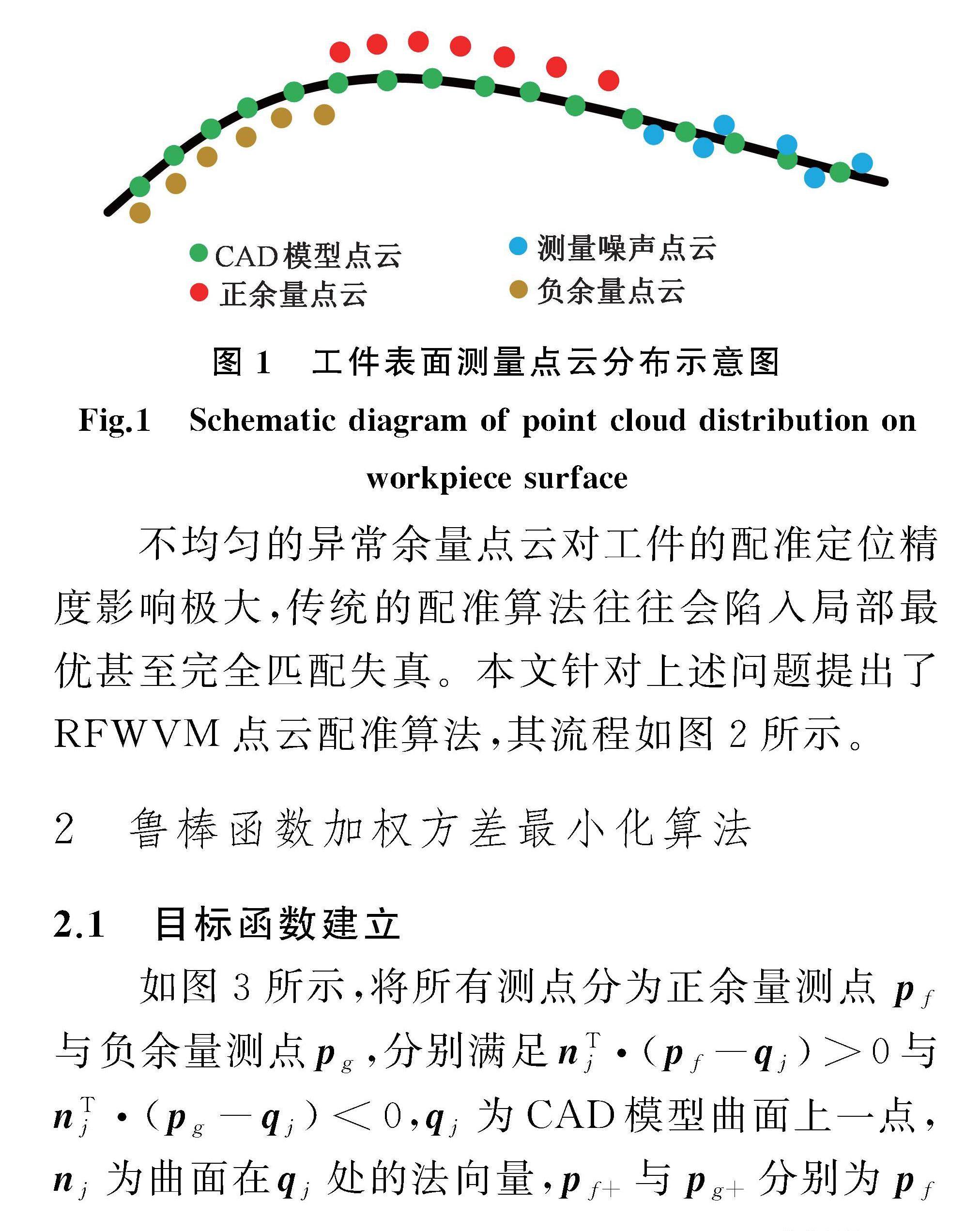
智能制造 | 异常点云干扰下的车身构件鲁棒性配准方法
智能制造 | 异常点云干扰下的车身构件鲁棒性配准方法
-
先进材料加工工程 | 基于小样本数据驱动的弹壳打凹平底成形工艺参数优化决策方法
先进材料加工工程 | 基于小样本数据驱动的弹壳打凹平底成形工艺参数优化决策方法
-
先进材料加工工程 | 残余应力对GH3230层板焊缝热疲劳寿命影响规律研究
先进材料加工工程 | 残余应力对GH3230层板焊缝热疲劳寿命影响规律研究
-
先进材料加工工程 | 36MnVS4和46MnVS5连杆裂解性能差异性研究及质量缺陷分析
先进材料加工工程 | 36MnVS4和46MnVS5连杆裂解性能差异性研究及质量缺陷分析
-
工程前沿 | 小半径曲线上P75钢轨打磨廓形设计及应用研究
工程前沿 | 小半径曲线上P75钢轨打磨廓形设计及应用研究
-
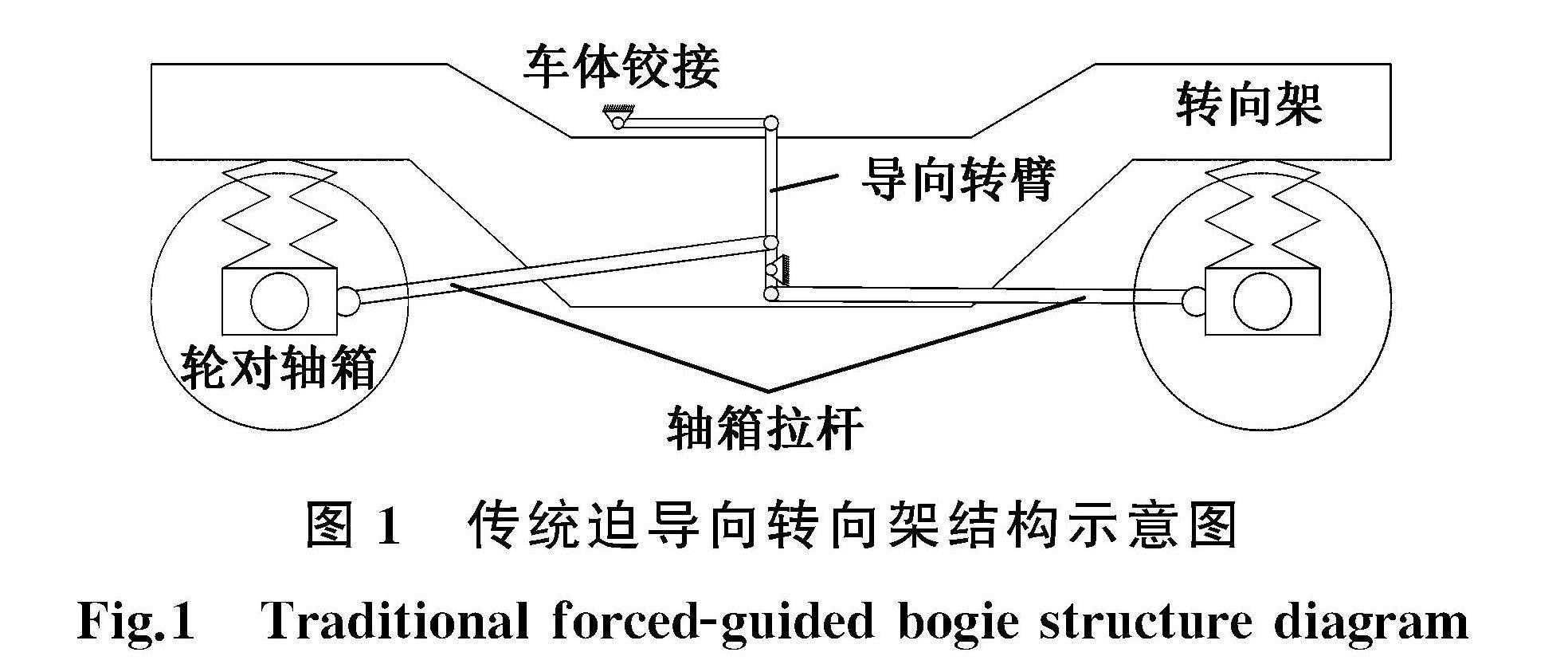
工程前沿 | 复合型径向机构在地铁车辆上的适用性研究
工程前沿 | 复合型径向机构在地铁车辆上的适用性研究
-
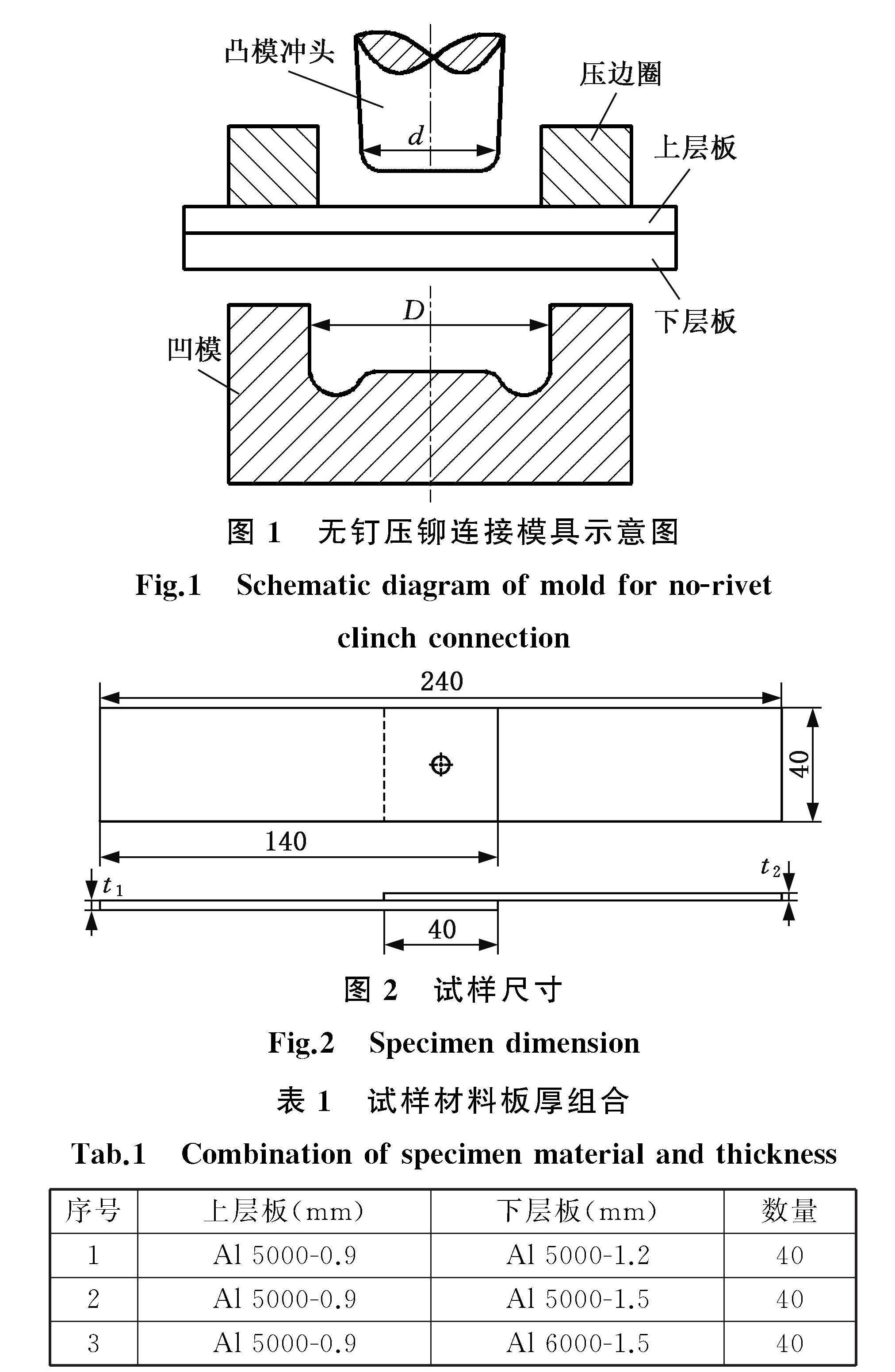
工程前沿 | 基于等效结构应力法的铝合金无钉压铆接头疲劳分析与试验研究
工程前沿 | 基于等效结构应力法的铝合金无钉压铆接头疲劳分析与试验研究














 登录
登录