
目录
快速导航-

智能车辆动态轨迹预测、规划与跟踪控制技术专题 | 基于可变分辨率混合A*和可变曲率RS曲线融合的动态路径规划方法
智能车辆动态轨迹预测、规划与跟踪控制技术专题 | 基于可变分辨率混合A*和可变曲率RS曲线融合的动态路径规划方法
-
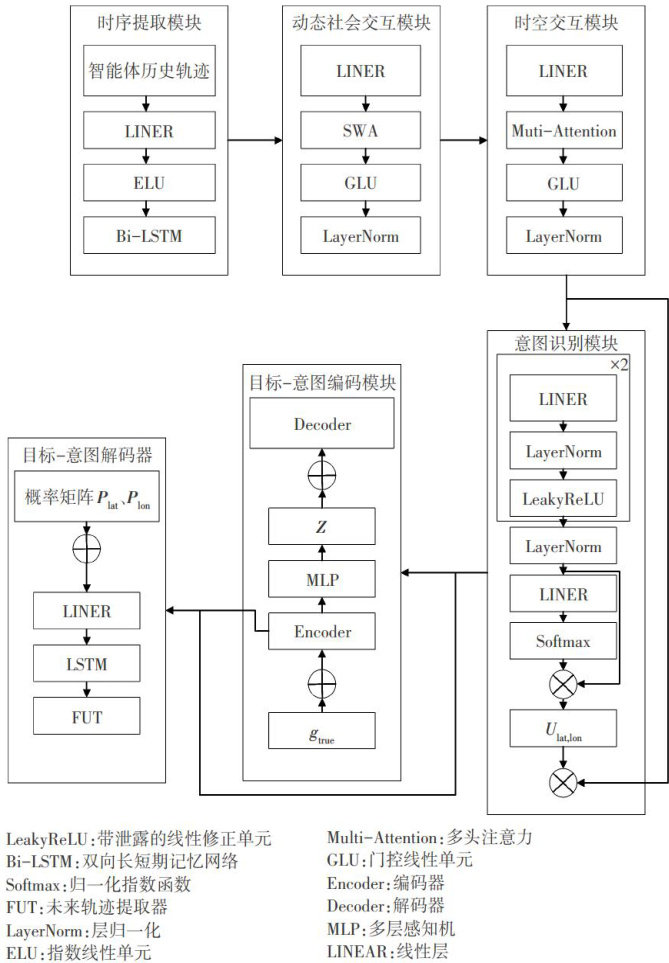
智能车辆动态轨迹预测、规划与跟踪控制技术专题 | 融合驾驶意图和目标的动态注意力轨迹预测
智能车辆动态轨迹预测、规划与跟踪控制技术专题 | 融合驾驶意图和目标的动态注意力轨迹预测
-
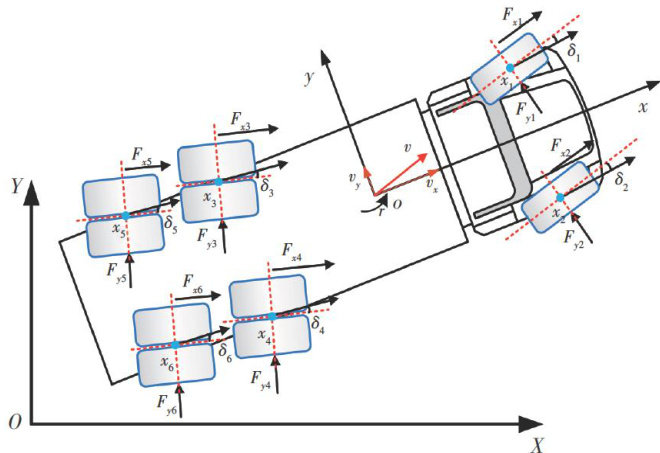
智能车辆动态轨迹预测、规划与跟踪控制技术专题 | 基于无限时域模型预测控制的三轴车辆可容错轨迹跟踪控制
智能车辆动态轨迹预测、规划与跟踪控制技术专题 | 基于无限时域模型预测控制的三轴车辆可容错轨迹跟踪控制
-

智能车辆动态轨迹预测、规划与跟踪控制技术专题 | 基于最小化车辆比功率分布误差标定的车辆跟驰模型排放仿真
智能车辆动态轨迹预测、规划与跟踪控制技术专题 | 基于最小化车辆比功率分布误差标定的车辆跟驰模型排放仿真
-
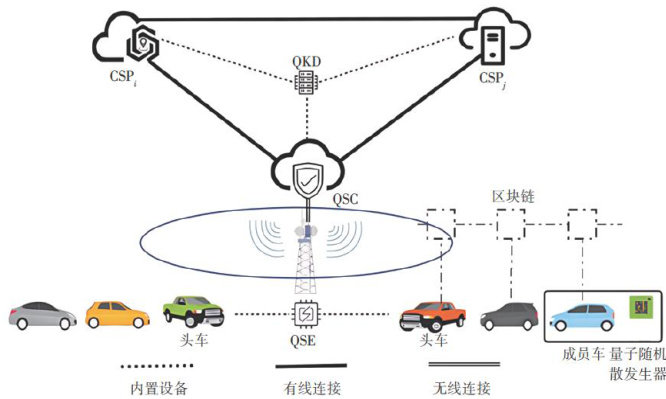
智能车辆动态轨迹预测、规划与跟踪控制技术专题 | 多云环境下基于区块链的车列协同认证方案
智能车辆动态轨迹预测、规划与跟踪控制技术专题 | 多云环境下基于区块链的车列协同认证方案
-
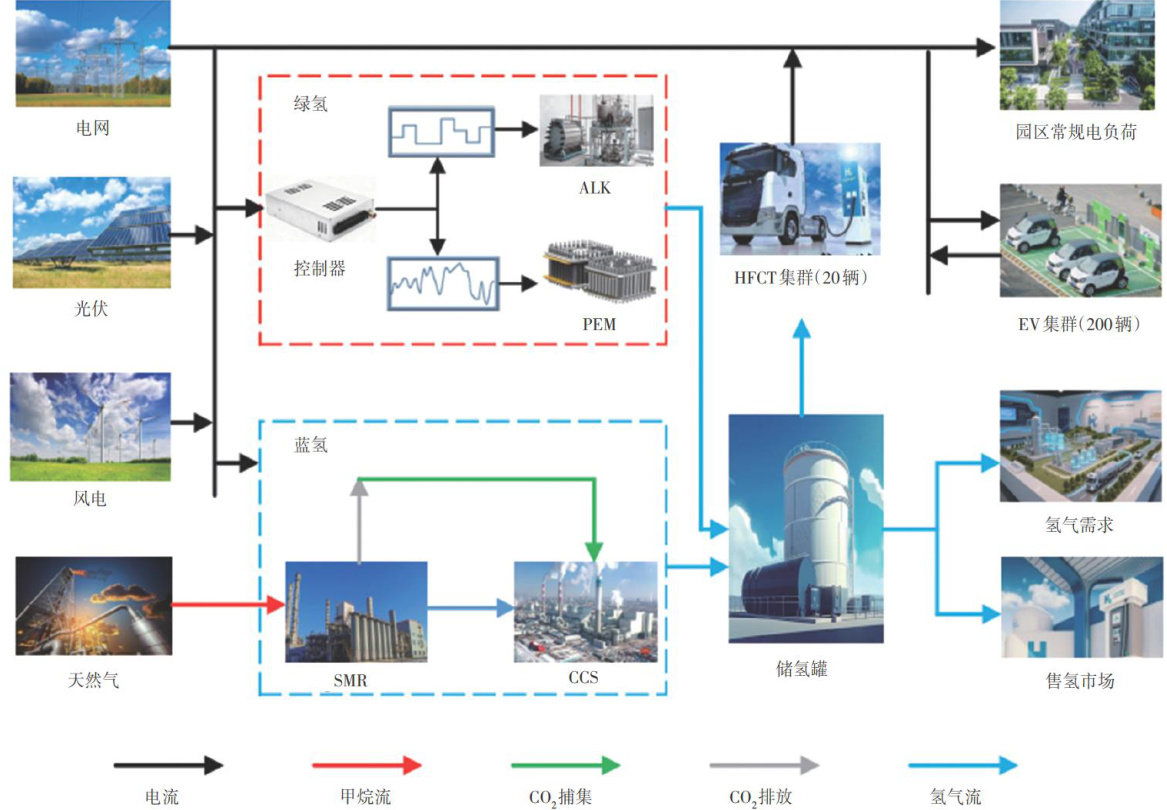
智能车辆动态轨迹预测、规划与跟踪控制技术专题 | 计及异构交通流集群聚合的风光耦合蓝绿氢系统协同优化调度
智能车辆动态轨迹预测、规划与跟踪控制技术专题 | 计及异构交通流集群聚合的风光耦合蓝绿氢系统协同优化调度
-
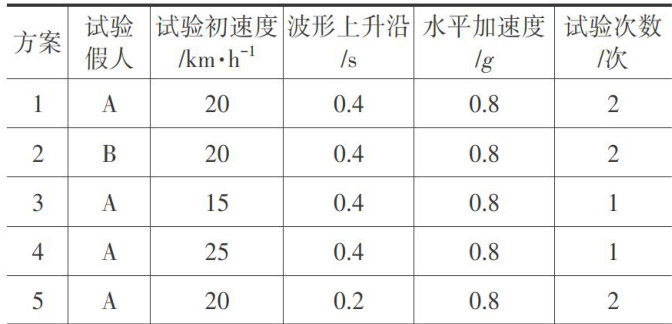
智能车辆动态轨迹预测、规划与跟踪控制技术专题 | AEB制动下BioRID-I假人生物仿真度研究
智能车辆动态轨迹预测、规划与跟踪控制技术专题 | AEB制动下BioRID-I假人生物仿真度研究












 登录
登录