
目录
快速导航-
车辆动力学智能控制与能效优化专刊 | 基于红嘴蓝鹊线性二次型调节器的主动悬架控制策略研究
车辆动力学智能控制与能效优化专刊 | 基于红嘴蓝鹊线性二次型调节器的主动悬架控制策略研究
-
车辆动力学智能控制与能效优化专刊 | 基于模糊天棚的垂向动力学自适应控制研究
车辆动力学智能控制与能效优化专刊 | 基于模糊天棚的垂向动力学自适应控制研究
-

车辆动力学智能控制与能效优化专刊 | 基于上界滑模控制的防侧倾稳定性分析
车辆动力学智能控制与能效优化专刊 | 基于上界滑模控制的防侧倾稳定性分析
-
车辆动力学智能控制与能效优化专刊 | 基于自适应非奇异滑模的四轮独立驱动电动汽车稳定性控制
车辆动力学智能控制与能效优化专刊 | 基于自适应非奇异滑模的四轮独立驱动电动汽车稳定性控制
-
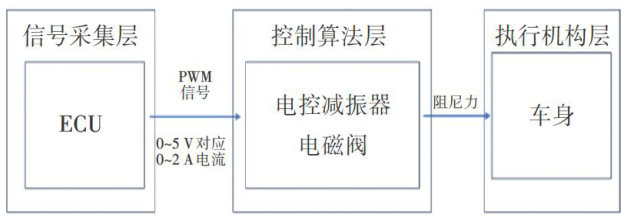
车辆动力学智能控制与能效优化专刊 | 基于脉冲宽度调制与颤振控制的电控减振器动态响应研究
车辆动力学智能控制与能效优化专刊 | 基于脉冲宽度调制与颤振控制的电控减振器动态响应研究
-

车辆动力学智能控制与能效优化专刊 | 基于AMESim的电磁阀式减振器参数优化研究
车辆动力学智能控制与能效优化专刊 | 基于AMESim的电磁阀式减振器参数优化研究
-

车辆动力学智能控制与能效优化专刊 | 电动汽车低温轮胎滚动阻力特性与整车能耗仿真及测试分析
车辆动力学智能控制与能效优化专刊 | 电动汽车低温轮胎滚动阻力特性与整车能耗仿真及测试分析













 登录
登录