

目录
快速导航-
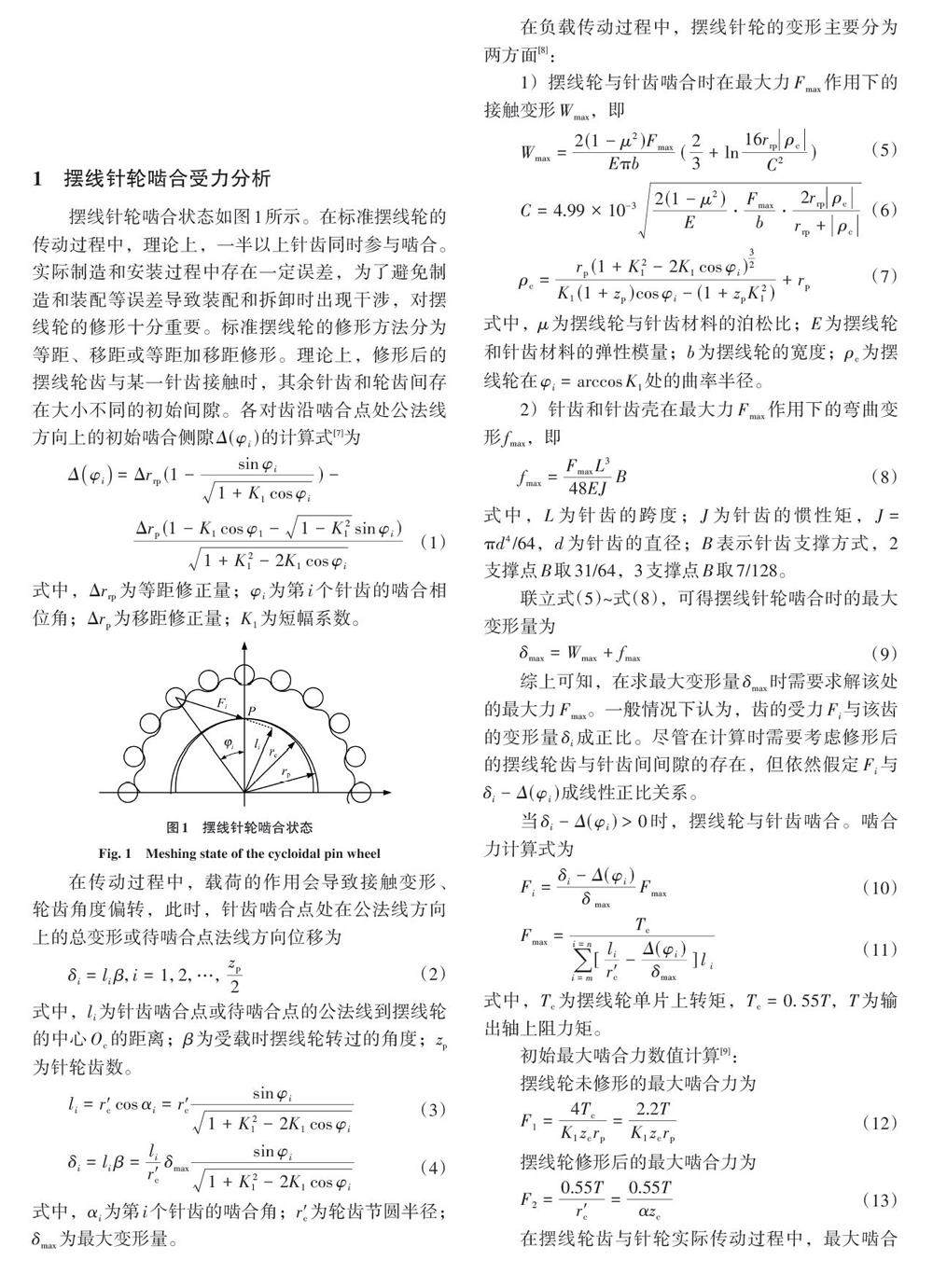
理论研究 | 摆线针轮啮合刚度计算与仿真分析研究
理论研究 | 摆线针轮啮合刚度计算与仿真分析研究
-
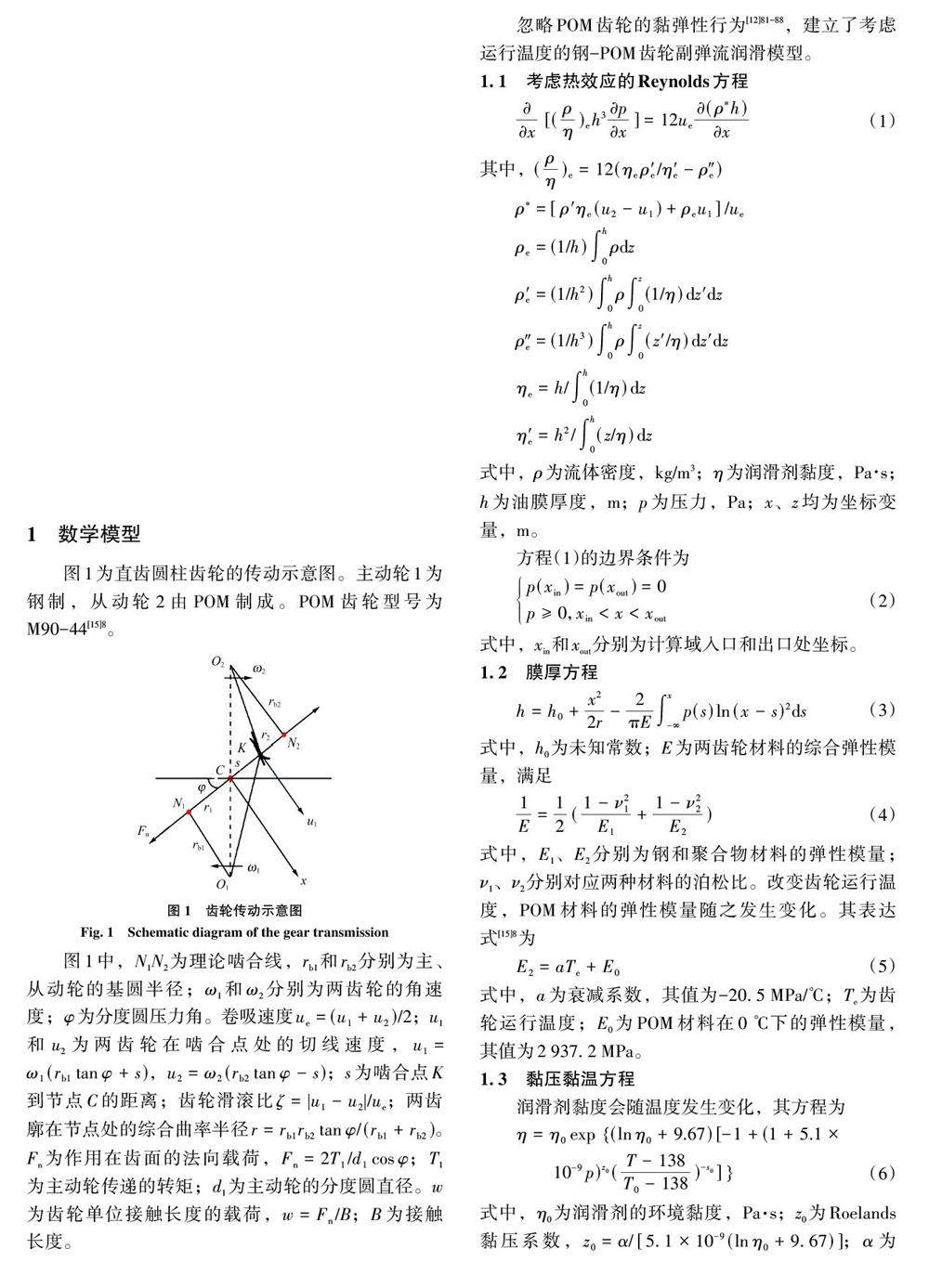
理论研究 | 运行温度对钢-POM齿轮副热弹流润滑性能的影响
理论研究 | 运行温度对钢-POM齿轮副热弹流润滑性能的影响
-

理论研究 | 四点接触球轴承重要结构参数分析方法
理论研究 | 四点接触球轴承重要结构参数分析方法
-

理论研究 | 同一凸转子上节圆内、外工作轮廓间的互求机制
理论研究 | 同一凸转子上节圆内、外工作轮廓间的互求机制
-
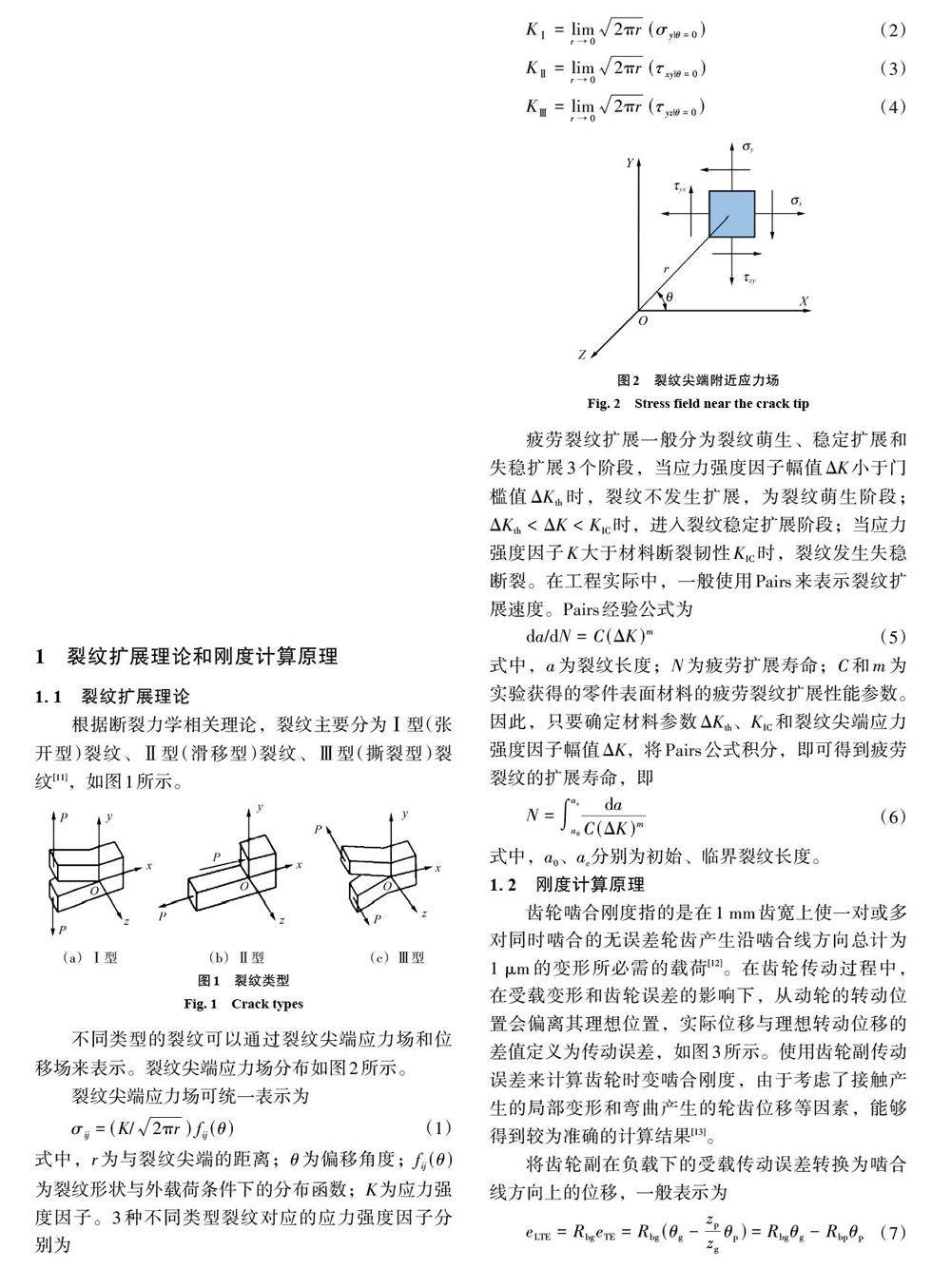
理论研究 | 齿根疲劳裂纹扩展特性及其对啮合刚度的影响
理论研究 | 齿根疲劳裂纹扩展特性及其对啮合刚度的影响
-
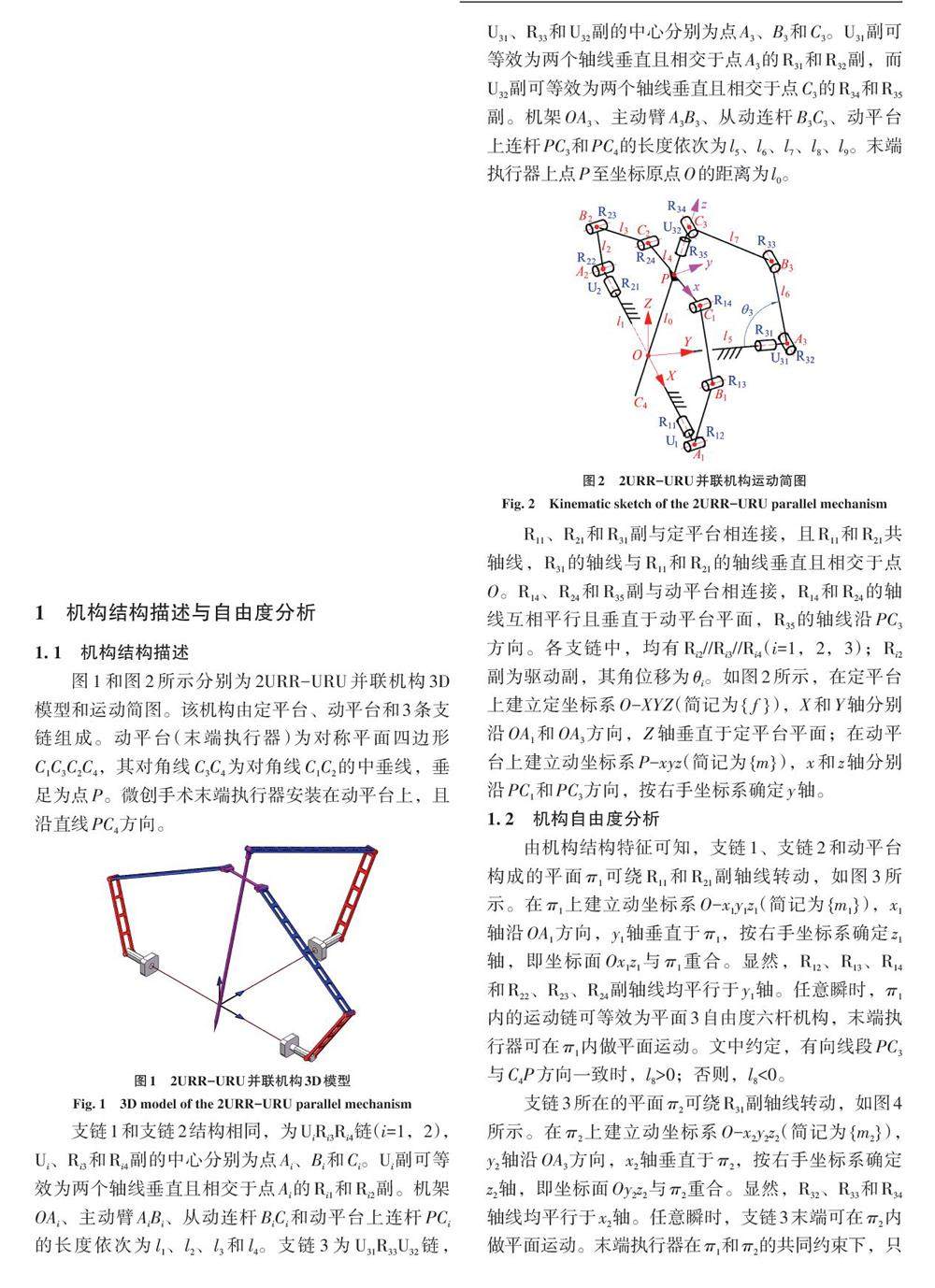
设计计算 | 2URR-URU远中心并联机构性能分析与尺度优化
设计计算 | 2URR-URU远中心并联机构性能分析与尺度优化
-
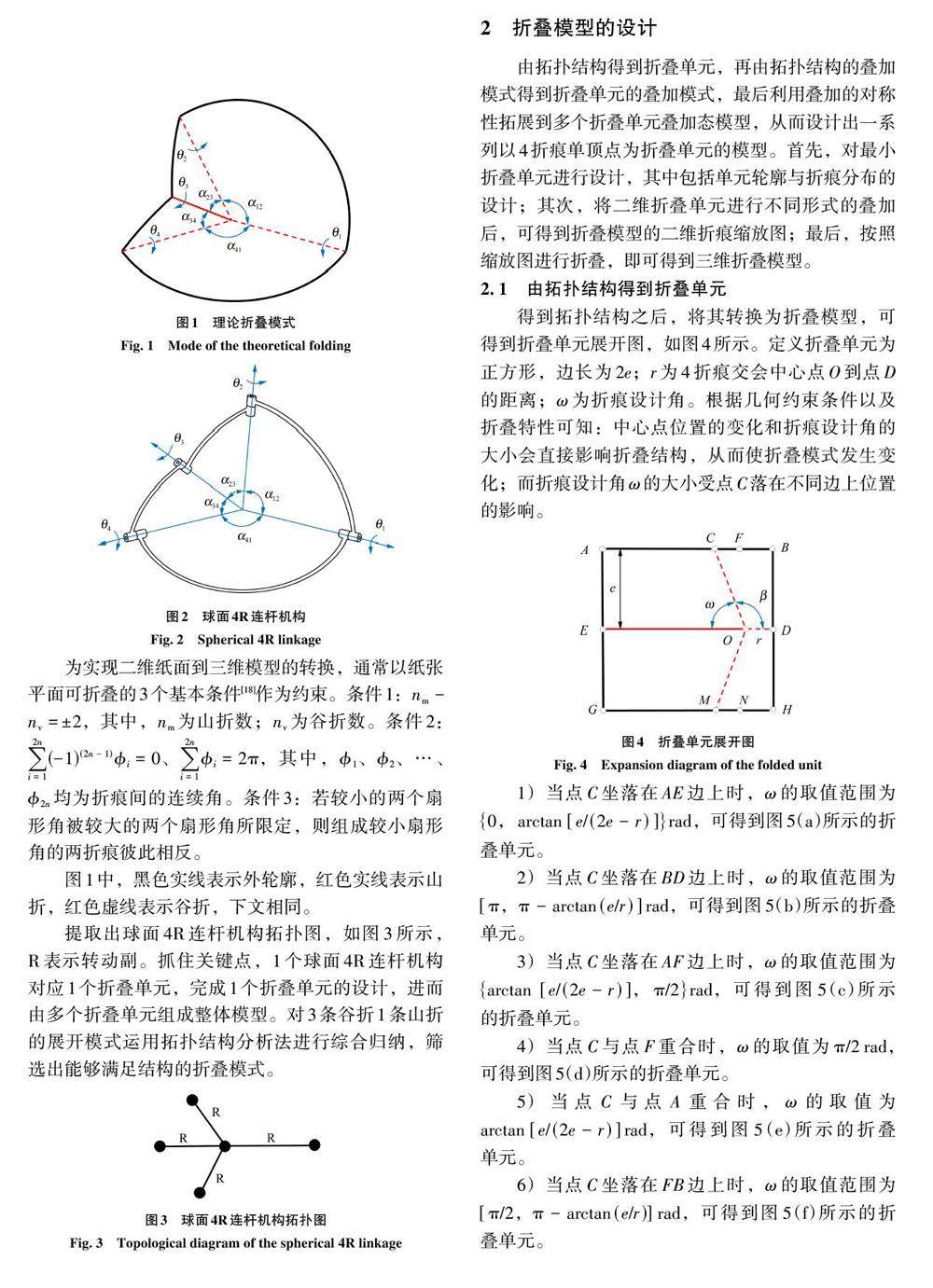
设计计算 | 由折纸启发的可折叠结构设计及分析
设计计算 | 由折纸启发的可折叠结构设计及分析
-
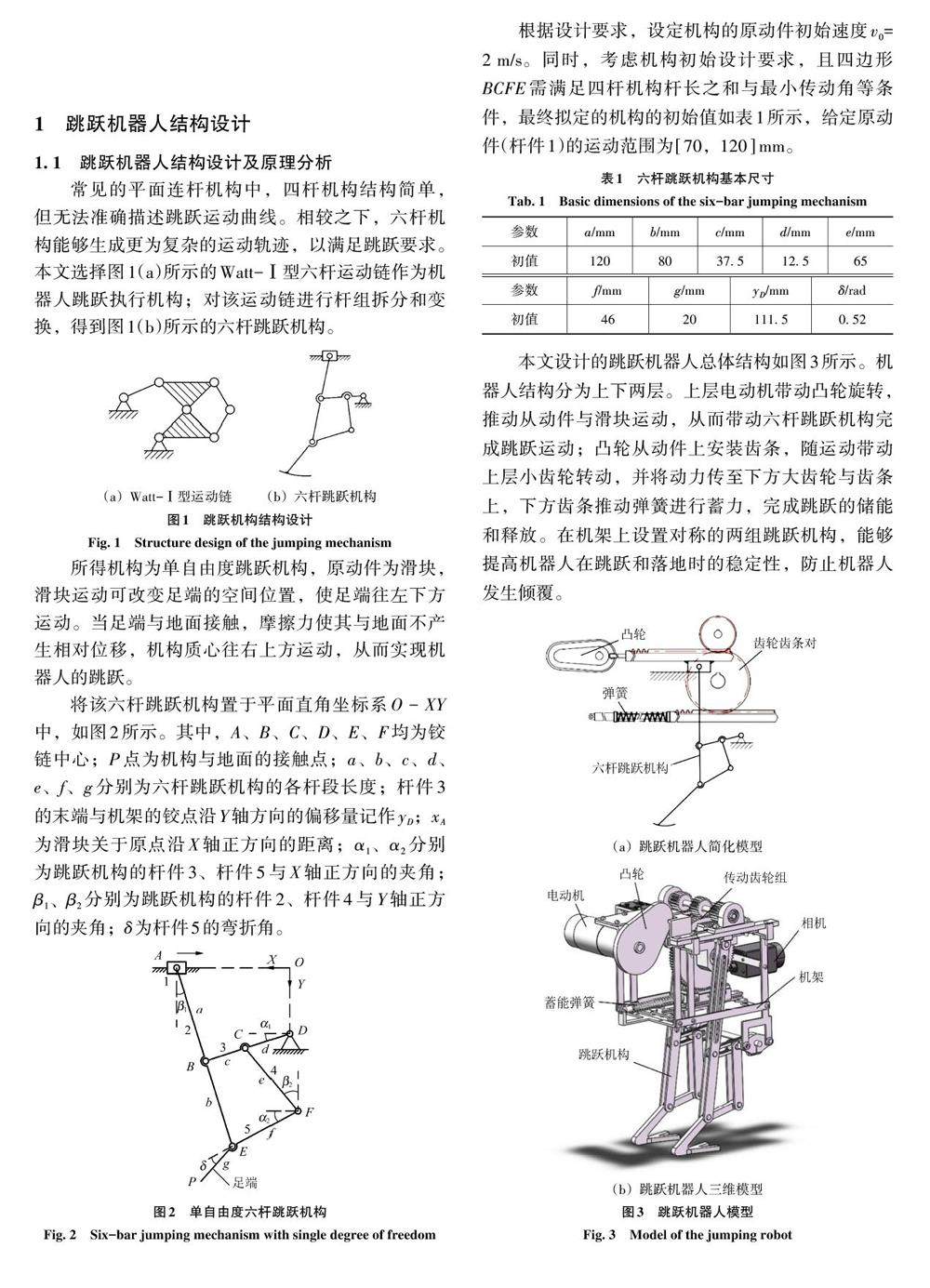
设计计算 | 基于速度可操作度的跳跃机构结构设计和优化
设计计算 | 基于速度可操作度的跳跃机构结构设计和优化
-
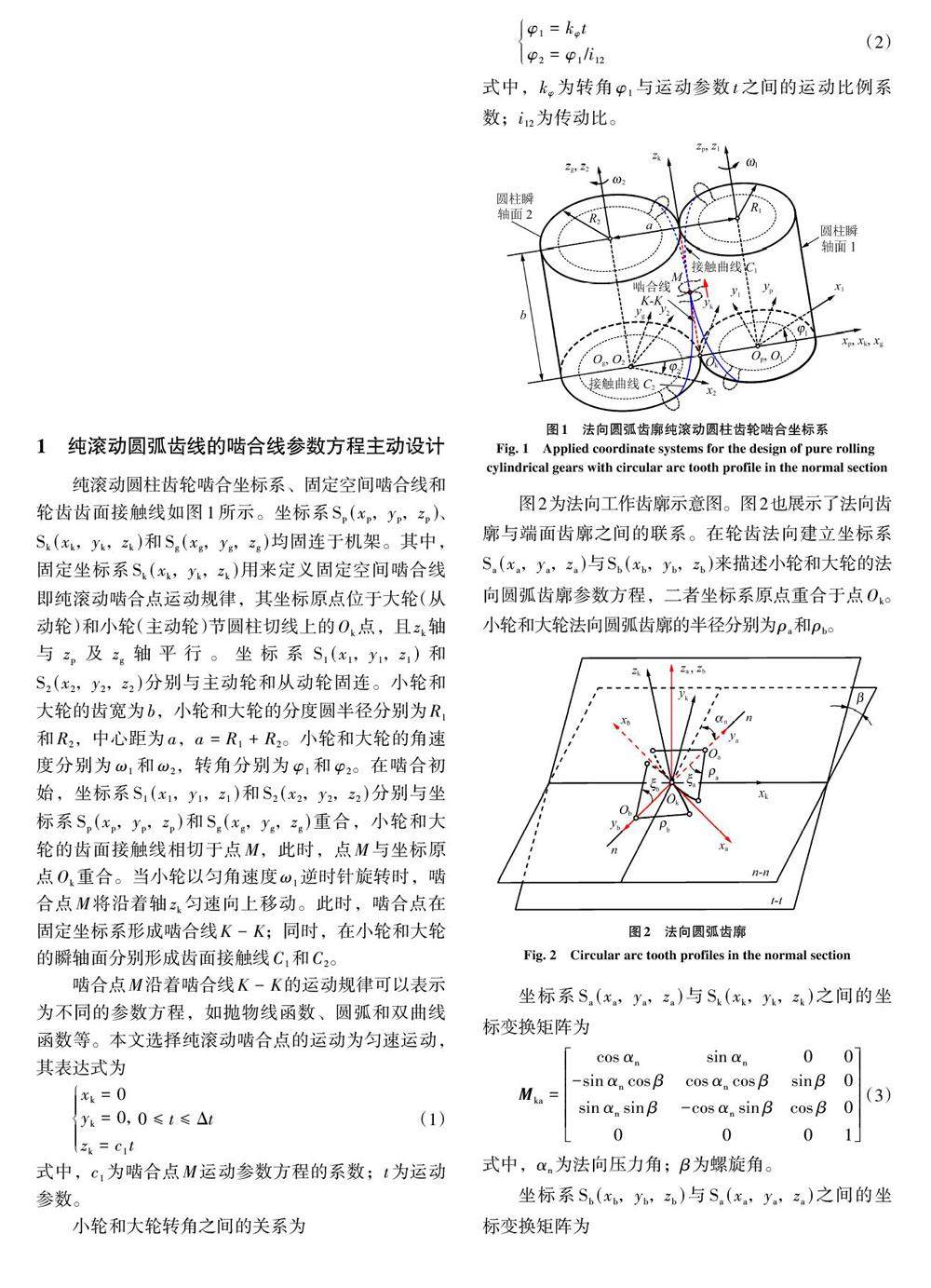
设计计算 | 法向圆弧齿廓纯滚动圆柱齿轮设计
设计计算 | 法向圆弧齿廓纯滚动圆柱齿轮设计
-
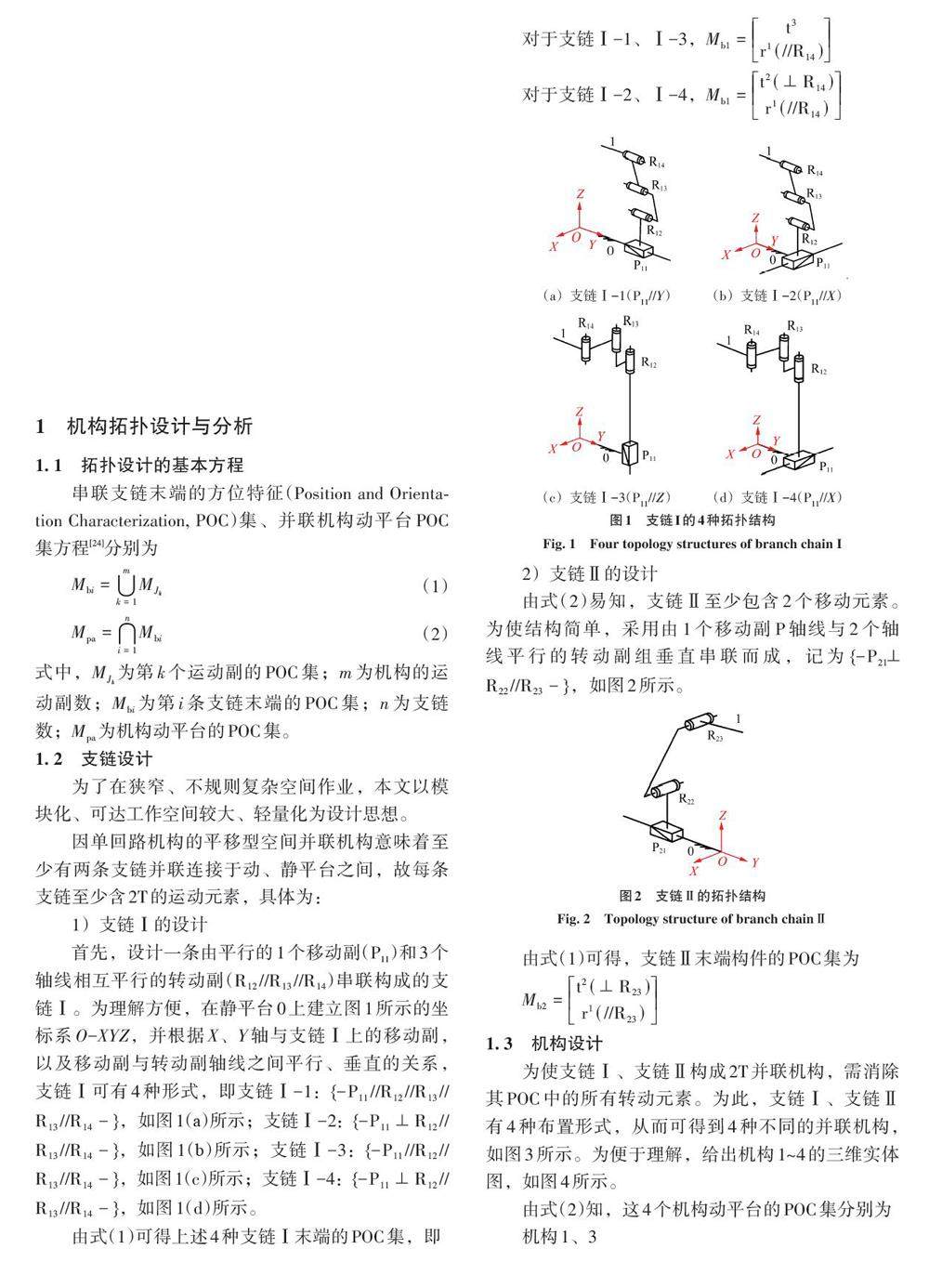
设计计算 | 运动解耦的单回路平移空间并联机构的拓扑设计与运动尺寸优化
设计计算 | 运动解耦的单回路平移空间并联机构的拓扑设计与运动尺寸优化
-
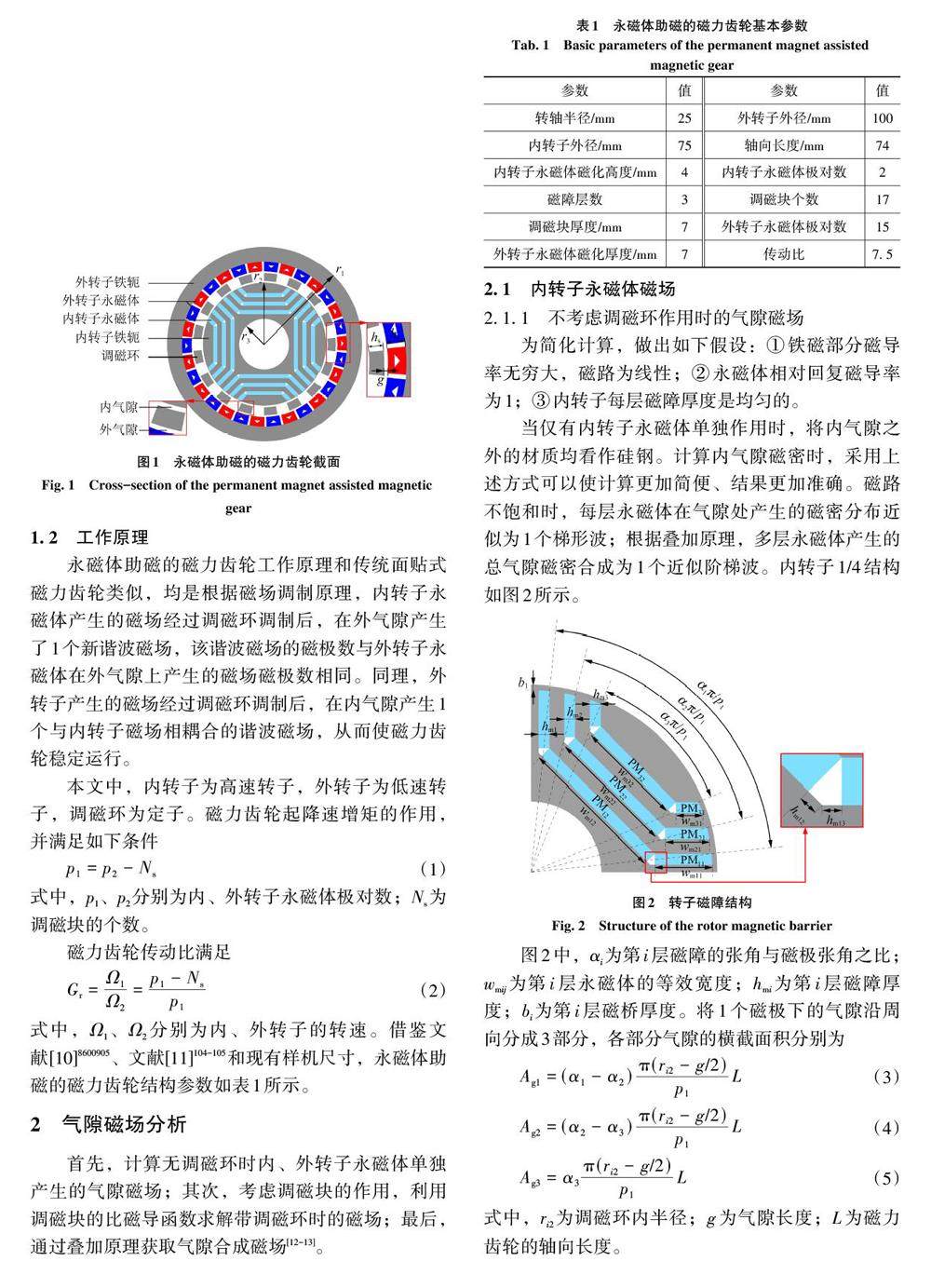
设计计算 | 永磁体助磁的磁力齿轮理论分析与优化设计
设计计算 | 永磁体助磁的磁力齿轮理论分析与优化设计
-
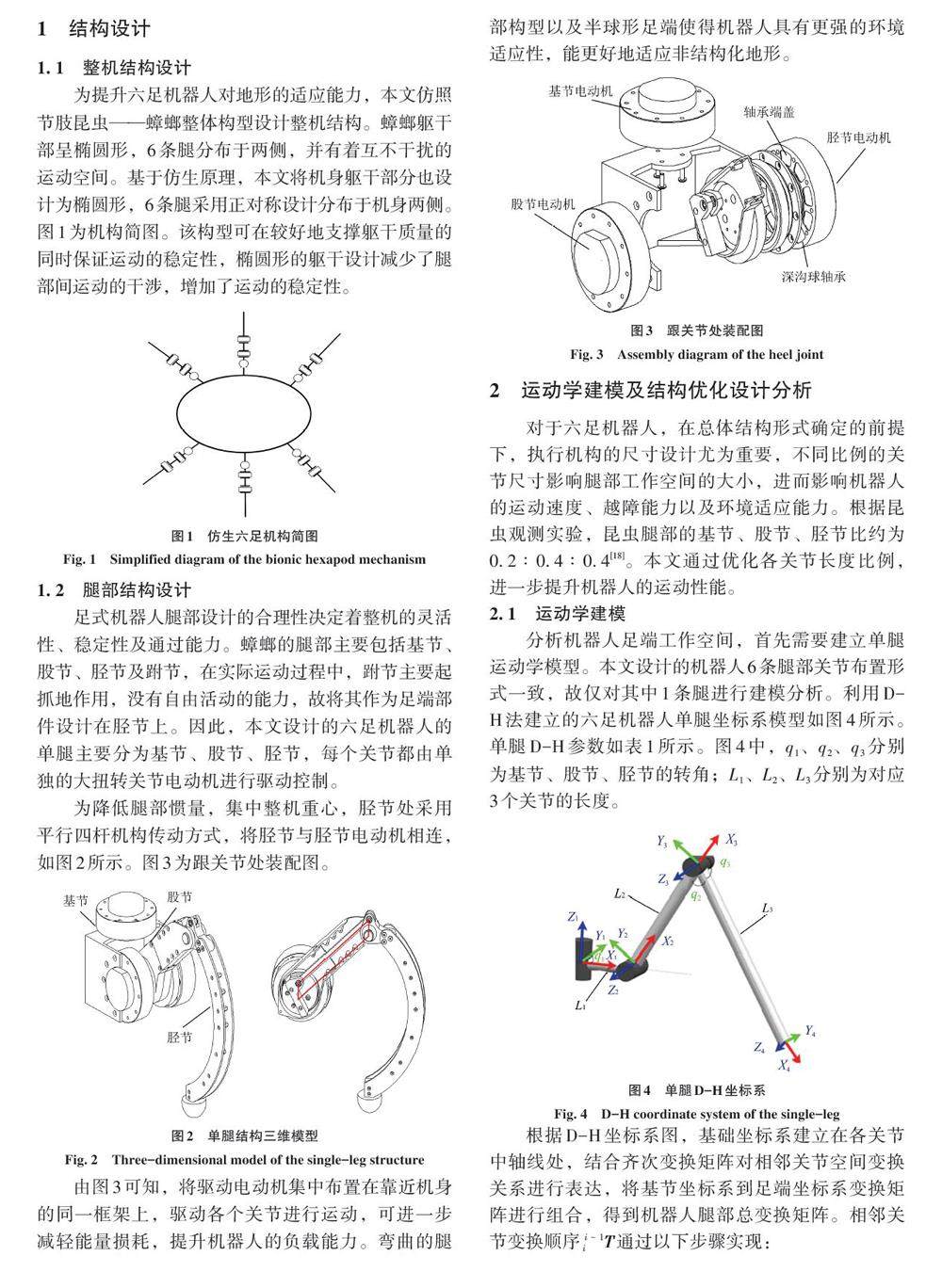
设计计算 | 六足侦察机器人结构设计及越障性能分析
设计计算 | 六足侦察机器人结构设计及越障性能分析
-
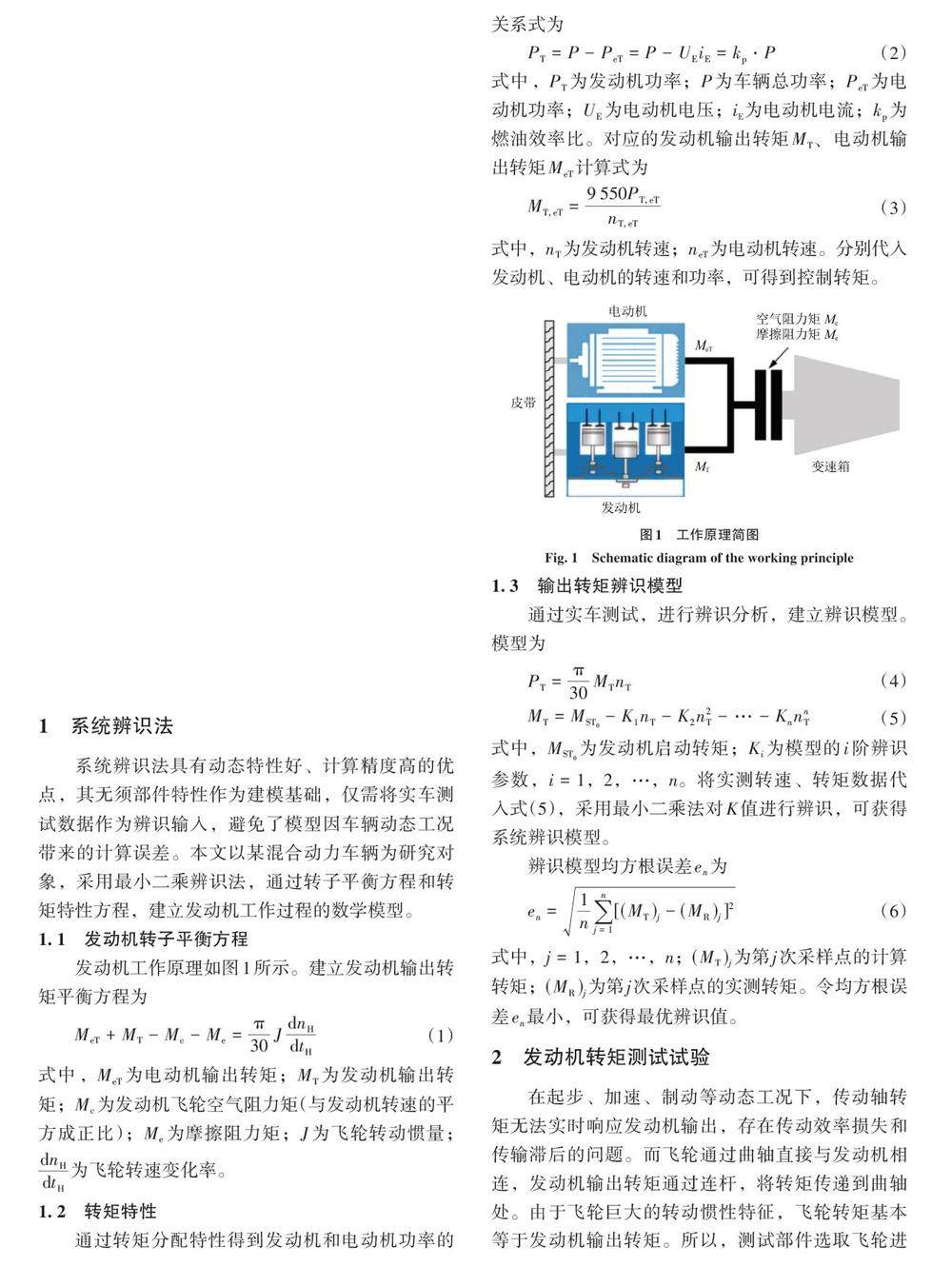
试验分析 | 混合动力车辆无线转矩测试系统设计及参数辨识
试验分析 | 混合动力车辆无线转矩测试系统设计及参数辨识
-
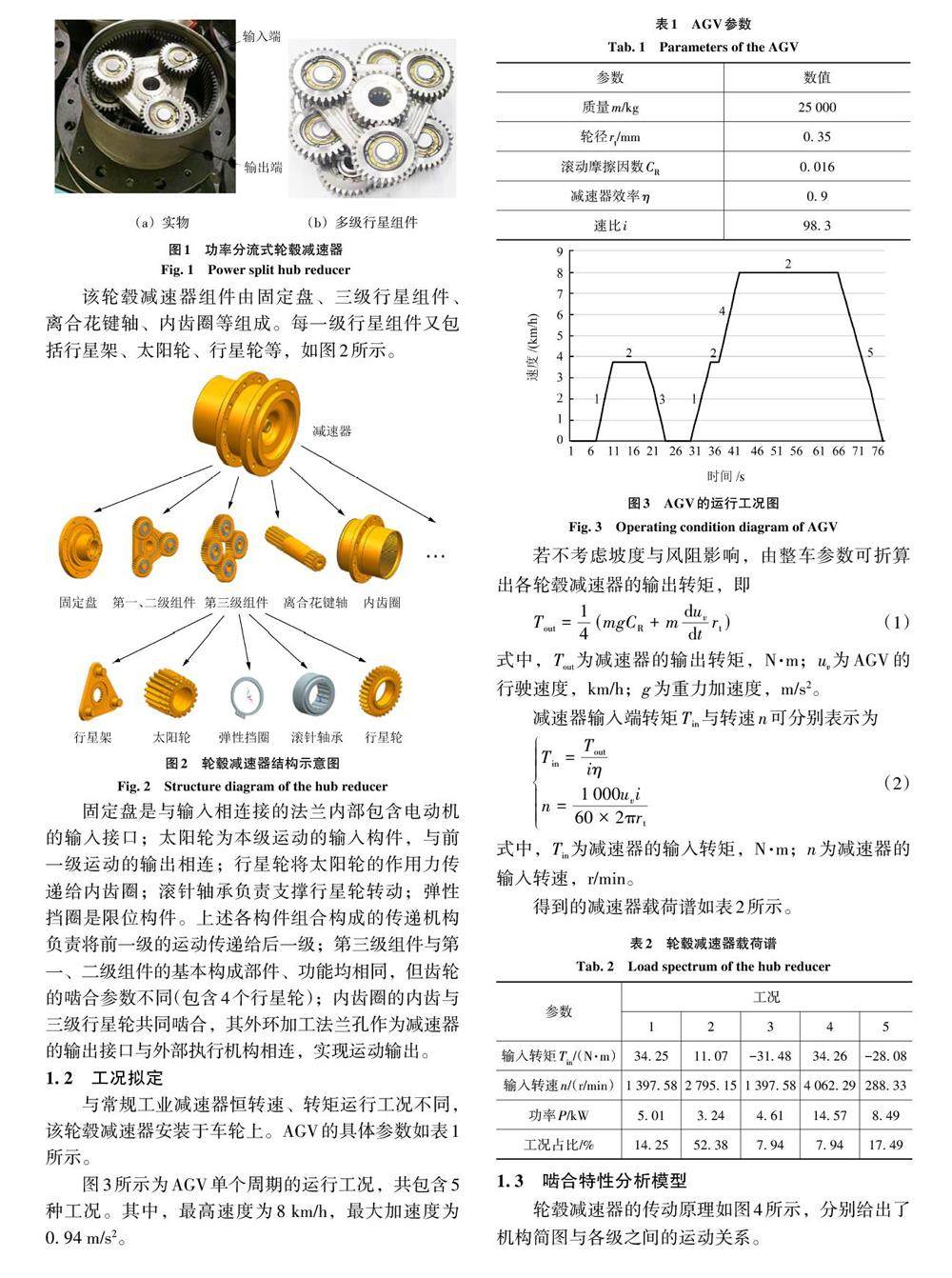
试验分析 | 功率分流式轮毂减速器啮合特性分析与优化
试验分析 | 功率分流式轮毂减速器啮合特性分析与优化
-
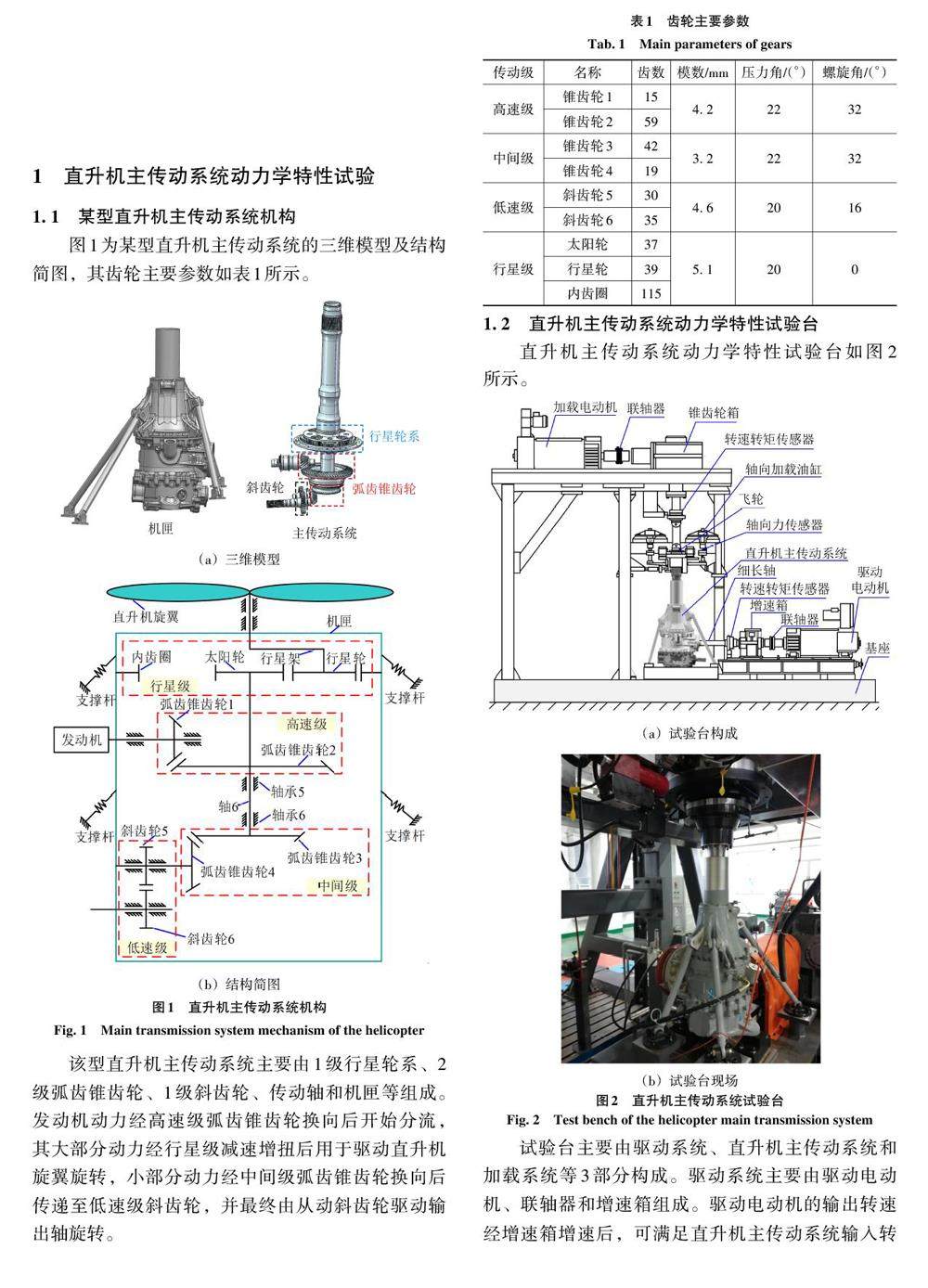
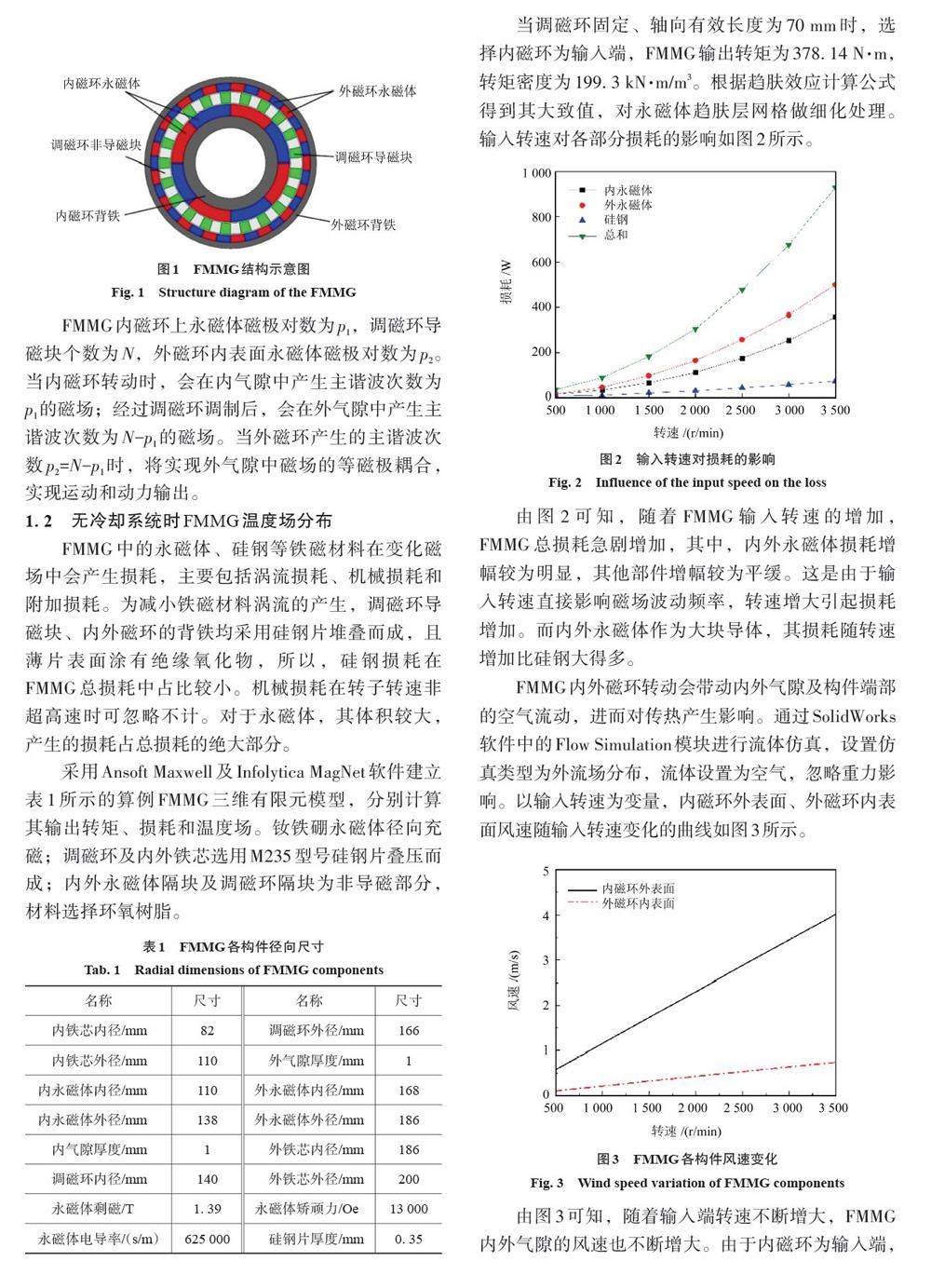
试验分析 | 直升机主传动系统动力学特性试验研究
试验分析 | 直升机主传动系统动力学特性试验研究
-
试验分析 | 基于脉动热管和强制风冷的同轴式磁齿轮高效热管理
试验分析 | 基于脉动热管和强制风冷的同轴式磁齿轮高效热管理
-

开发应用 | 基于扭振调制信号双谱复合谱特征的行星齿轮箱故障诊断
开发应用 | 基于扭振调制信号双谱复合谱特征的行星齿轮箱故障诊断
-
开发应用 | 基于相变冷却原理的磁场调制型永磁齿轮热管散热优化设计与试验研究
开发应用 | 基于相变冷却原理的磁场调制型永磁齿轮热管散热优化设计与试验研究
-
开发应用 | 多功能辅助解便护理床结构设计与研究
开发应用 | 多功能辅助解便护理床结构设计与研究
-
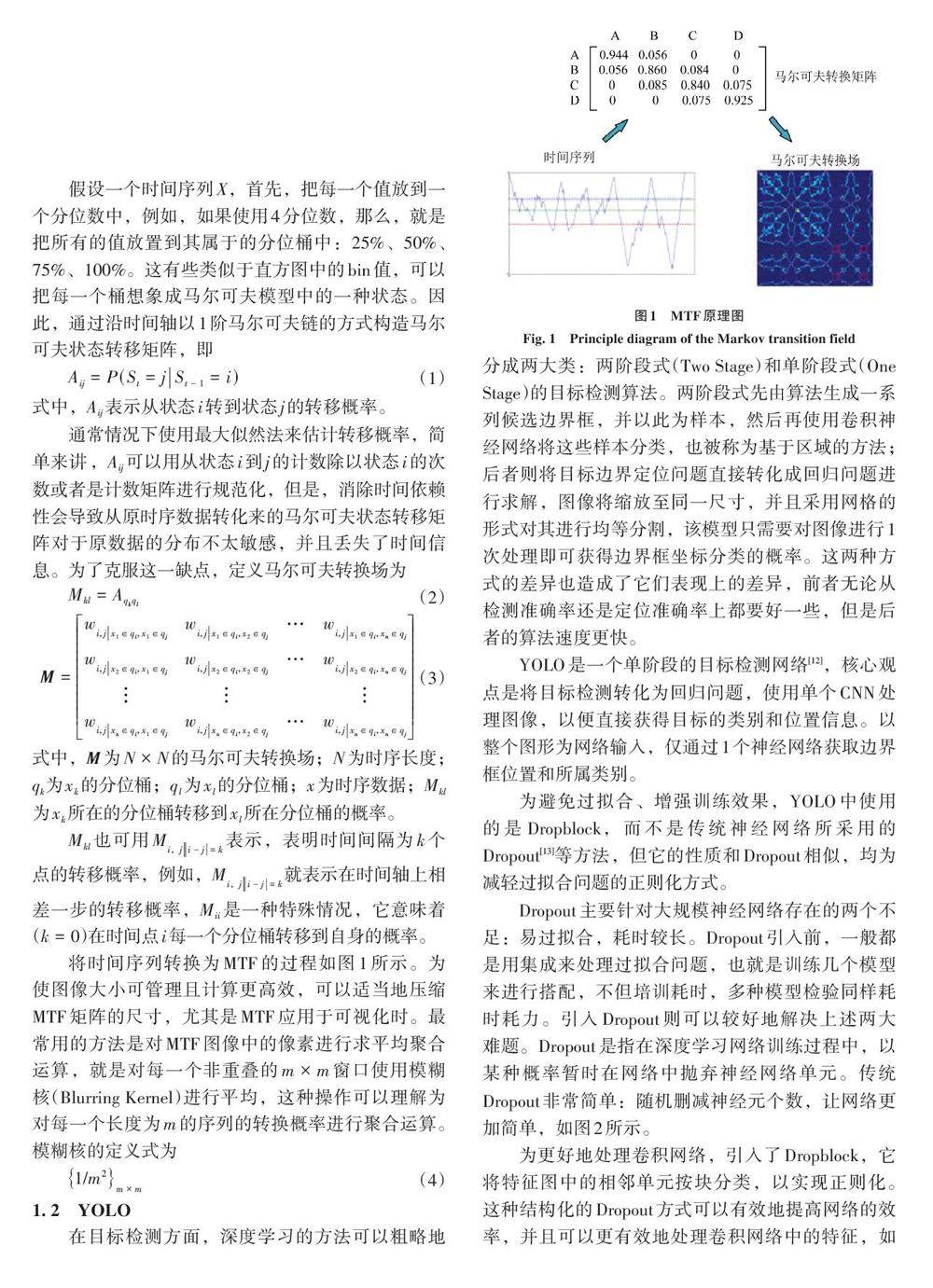
开发应用 | 基于M-YOLO网络的滚动轴承故障诊断模型
开发应用 | 基于M-YOLO网络的滚动轴承故障诊断模型
-
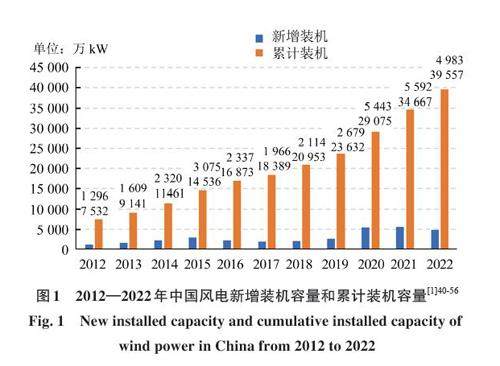
综述 | 复杂工况下大型风电传动链故障诊断方法研究综述
综述 | 复杂工况下大型风电传动链故障诊断方法研究综述
-
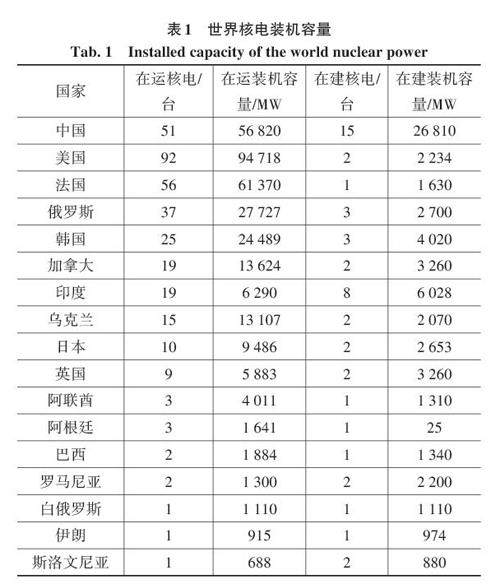
综述 | 大功率核电循环泵用齿轮箱研究现状
综述 | 大功率核电循环泵用齿轮箱研究现状











 登录
登录